A Fully Analog Implementation of Model Predictive Control with Application to Buck Converters
作者: Simone Pirrera, Lorenzo Calogero, Francesco Gabriele, Diego Regruto, Alessandro Rizzo, Gianluca Setti
分类: eess.SY
发布日期: 2025-09-05 (更新: 2026-01-16)
💡 一句话要点
提出一种全模拟模型预测控制实现方法,应用于Buck变换器。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 模型预测控制 模拟电路 DC-DC变换器 显式MPC 嵌入式系统
📋 核心要点
- 传统MPC计算复杂度高,难以在资源受限的嵌入式系统中实时实现,尤其是在全模拟电路中。
- 该论文提出一种基于简化显式MPC形式的全模拟电路实现方法,降低了计算复杂度,并利用低延迟商用组件实现。
- 通过在DC-DC Buck变换器上的应用,验证了该方法的实际可行性,并通过数值模拟证明了其抗扰动性能。
📝 摘要(中文)
本文提出了一种设计模拟电子电路的新方法,该电路实现了针对仿射模型描述的动态系统的模型预测控制(MPC)策略。通过结合有效的降复杂度的显式MPC形式,并将其应用于包含有限数量的低延迟商用组件的模拟电路的实现。通过将其应用于基于MPC的新型DC-DC Buck变换器控制器的设计,证明了所提出方法的实际可行性和有效性。我们正式分析了所得系统的稳定性,并进行了广泛的数值模拟,以证明控制系统在抑制线路和负载扰动方面的性能。
🔬 方法详解
问题定义:论文旨在解决模型预测控制(MPC)在动态系统中的实时实现问题,尤其是在资源受限的模拟电路中。传统的数字MPC实现需要复杂的计算单元,功耗高,难以满足一些对响应速度和功耗有严格要求的应用场景。现有模拟电路实现MPC的方法,复杂度高,难以工程实现。
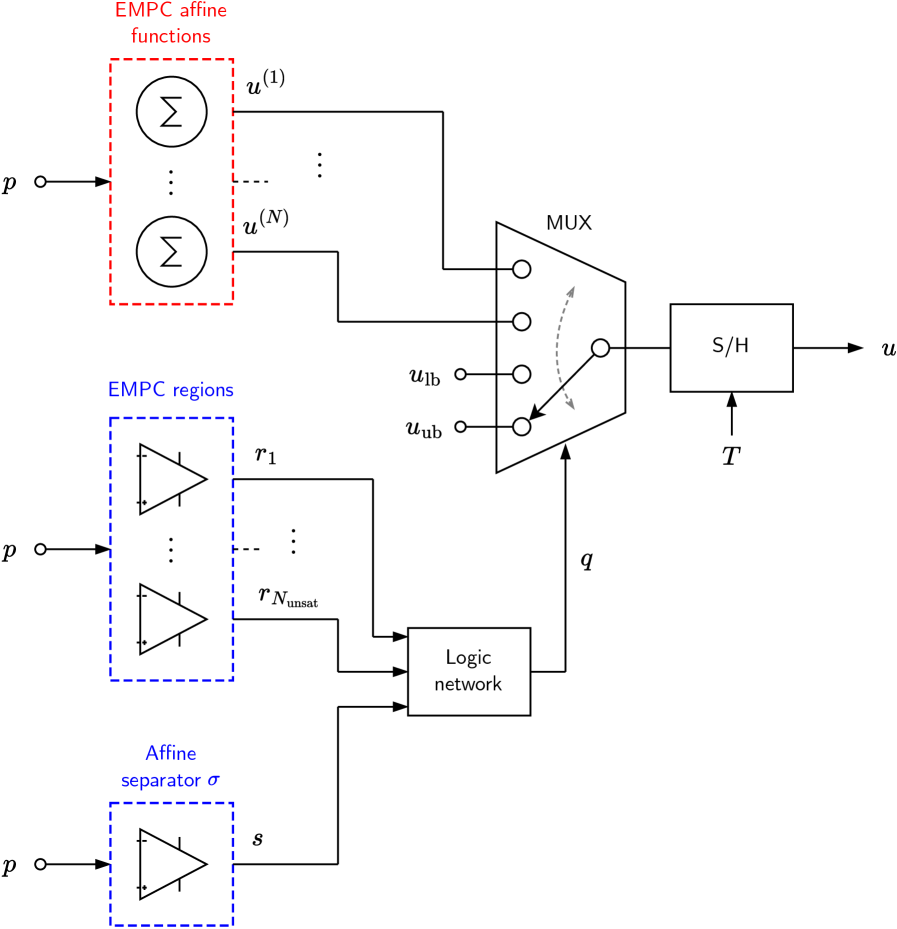
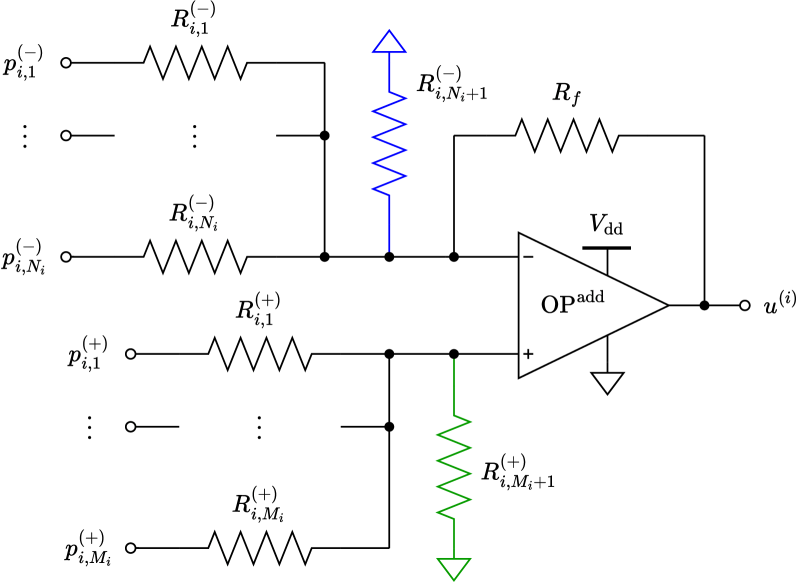
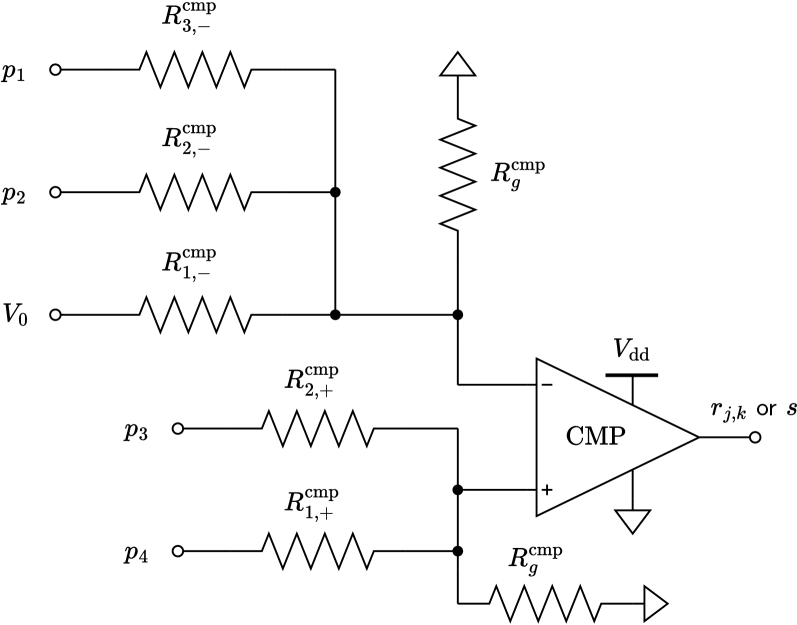
核心思路:论文的核心思路是将复杂的MPC问题转化为一个可以在模拟电路中高效实现的简化形式。通过采用降复杂度的显式MPC形式,将在线优化问题转化为一个分段仿射函数,从而可以使用简单的模拟电路元件(如运算放大器、电阻、电容等)来实现控制策略。
技术框架:该方法主要包含以下几个阶段:1) 针对仿射动态系统建立模型;2) 设计MPC控制器,包括定义成本函数、约束条件等;3) 将MPC问题转化为显式MPC形式,降低计算复杂度;4) 将显式MPC形式映射到模拟电路,选择合适的电路拓扑和元件参数;5) 进行电路仿真和验证,评估控制性能。
关键创新:该论文的关键创新在于提出了一种将显式MPC与全模拟电路相结合的实现方法。与传统的数字MPC实现相比,该方法具有更低的延迟和功耗。与现有的模拟电路实现方法相比,该方法具有更低的复杂度,更易于工程实现。
关键设计:论文中关键的设计包括:1) 显式MPC形式的选择,需要权衡计算复杂度和控制性能;2) 模拟电路拓扑的选择,需要考虑元件的非理想特性和噪声影响;3) 电路元件参数的优化,需要保证控制系统的稳定性和鲁棒性。此外,论文还对Buck变换器的模型进行了简化,以便于MPC控制器的设计。
🖼️ 关键图片
📊 实验亮点
论文通过数值模拟验证了所提出的全模拟MPC控制器在DC-DC Buck变换器上的性能。结果表明,该控制器能够有效地抑制线路和负载扰动,实现稳定的电压输出。虽然论文中没有提供具体的性能数据,但强调了该方法在降低延迟和功耗方面的优势,使其在一些特定应用场景中具有竞争力。
🎯 应用场景
该研究成果可应用于对功耗和响应速度有严格要求的嵌入式系统,例如便携式电子设备、无线传感器网络、可穿戴设备等。特别是在DC-DC电源管理领域,该方法可以实现更高效、更快速的电压调节,提高电源系统的性能和可靠性。未来,该方法有望推广到其他类型的动态系统控制中,例如电机控制、机器人控制等。
📄 摘要(原文)
This paper proposes a novel approach to design analog electronic circuits that implement Model Predictive Control (MPC) policies for dynamical systems described by affine models. Effective approaches to define a reduced-complexity Explicit MPC form are combined and applied to realize an analog circuit comprising a limited set of low-latency, commercially available components. The practical feasibility and effectiveness of the proposed approach are demonstrated through its application in the design of a novel MPC-based controller for DC-DC Buck converters. We formally analyze the stability of the resulting system and conduct extensive numerical simulations to demonstrate the control system's performance in rejecting line and load disturbances.