Model predictive quantum control: A modular approach for efficient and robust quantum optimal control
作者: Eya Guizani, Julian Berberich
分类: eess.SY, math.OC, quant-ph
发布日期: 2025-09-05
💡 一句话要点
提出一种基于模型预测控制的模块化量子最优控制框架,提升效率和鲁棒性
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 量子最优控制 模型预测控制 量子控制 鲁棒控制 闭环控制
📋 核心要点
- 量子最优控制面临效率和鲁棒性挑战,传统方法在复杂系统和噪声环境下表现受限。
- 采用模型预测控制(MPC)框架,通过重复求解有限时域优化问题,实现高效控制。
- 数值实验验证了该框架在提高开环控制效率和闭环控制鲁棒性方面的有效性。
📝 摘要(中文)
本文提出了一种基于模型预测控制(MPC)的模块化框架,用于提高量子最优控制(QOC)的效率和鲁棒性。模型预测控制是一种成功的现代控制方法,它依赖于重复求解有限时域的最优控制问题,并应用最优输入的起始部分。本文首先从QOC的角度对MPC的基本概念进行了教程式的介绍。然后,我们提出了多种MPC方案,从简单的方法到具有稳定性保证的更复杂的方法。这产生了一个模块化框架,可用于1)提高开环QOC的效率,以及2)通过结合反馈来提高闭环量子控制的鲁棒性。我们通过数值结果证明了这些优点,并将所提出的方法与竞争方法进行了基准测试。
🔬 方法详解
问题定义:量子最优控制旨在寻找控制量子系统演化的最佳控制策略。现有方法在处理复杂量子系统和存在噪声干扰时,往往面临计算量大、鲁棒性差等问题。传统的开环控制方法对系统扰动敏感,而闭环控制方法的设计和实现较为复杂。
核心思路:本文的核心思路是将模型预测控制(MPC)应用于量子最优控制。MPC通过在每个时间步长求解一个有限时域的最优控制问题,并仅应用该最优控制序列的第一个控制输入,然后重复此过程。这种方法能够有效地应对系统扰动,提高控制的鲁棒性。
技术框架:该框架包含以下主要模块:1) 量子系统的模型建立;2) 基于模型的有限时域最优控制问题求解;3) 控制输入的施加;4) 系统状态的测量与反馈(可选)。该框架是模块化的,可以根据具体应用选择不同的MPC方案,例如简单的MPC方案或具有稳定性保证的更复杂的方案。
关键创新:该方法将经典控制理论中的MPC方法引入到量子控制领域,并针对量子系统的特点进行了改进。通过模块化的设计,该框架可以灵活地适应不同的量子控制任务和系统配置。此外,该方法还考虑了闭环控制,通过反馈机制进一步提高了控制的鲁棒性。
关键设计:关键设计包括:1) 选择合适的量子系统模型,例如薛定谔方程或主方程;2) 设计合适的性能指标,例如保真度或转移概率;3) 选择合适的优化算法,例如梯度下降法或共轭梯度法;4) 确定合适的预测时域长度和控制步长;5) 设计合适的反馈控制器(如果采用闭环控制)。
🖼️ 关键图片
📊 实验亮点
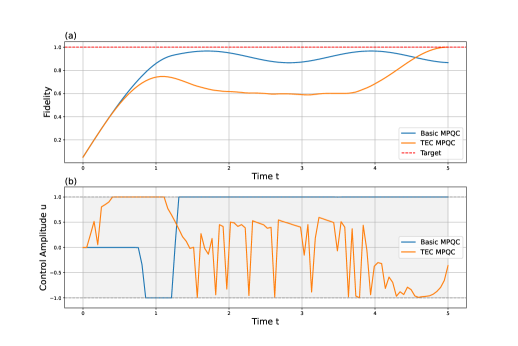
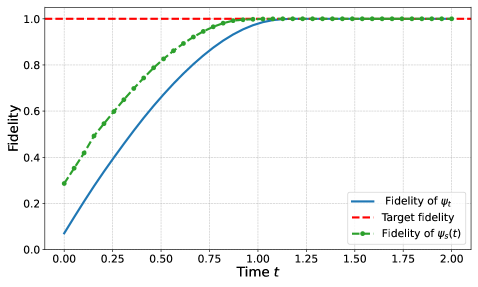
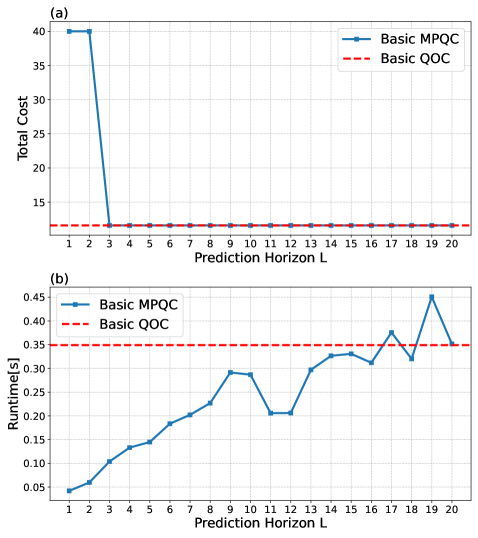
论文通过数值实验验证了所提出的MPC框架的有效性。实验结果表明,与传统的开环控制方法相比,该方法能够显著提高控制的效率和鲁棒性。具体而言,在相同的控制精度下,该方法可以减少计算时间,并对系统扰动具有更强的抵抗能力。此外,闭环MPC方案进一步提高了控制的鲁棒性。
🎯 应用场景
该研究成果可应用于量子计算、量子通信、量子传感等领域。通过提高量子控制的效率和鲁棒性,可以更好地实现量子算法、量子密钥分发和高精度量子测量。未来,该方法有望推动量子技术在各个领域的实际应用。
📄 摘要(原文)
Model predictive control (MPC) is one of the most successful modern control methods. It relies on repeatedly solving a finite-horizon optimal control problem and applying the beginning piece of the optimal input. In this paper, we develop a modular framework for improving efficiency and robustness of quantum optimal control (QOC) via MPC. We first provide a tutorial introduction to basic concepts of MPC from a QOC perspective. We then present multiple MPC schemes, ranging from simple approaches to more sophisticated schemes which admit stability guarantees. This yields a modular framework which can be used 1) to improve efficiency of open-loop QOC and 2) to improve robustness of closed-loop quantum control by incorporating feedback. We demonstrate these benefits with numerical results, where we benchmark the proposed methods against competing approaches.