Sailing Towards Zero-Shot State Estimation using Foundation Models Combined with a UKF
作者: Tobin Holtmann, David Stenger, Andres Posada-Moreno, Friedrich Solowjow, Sebastian Trimpe
分类: eess.SY, cs.LG
发布日期: 2025-09-04
备注: Accepted for publication at CDC2025
💡 一句话要点
提出FM-UKF,结合Transformer动态模型与UKF,实现零样本状态估计。
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 零样本学习 状态估计 基础模型 Transformer 无迹卡尔曼滤波 系统辨识 控制系统
📋 核心要点
- 传统状态估计依赖大量数据和手动系统辨识,难以泛化到新系统。
- FM-UKF结合Transformer学习的系统动力学和UKF,实现零样本状态估计。
- 在集装箱船模型基准测试中,FM-UKF在精度、工作量和鲁棒性上表现出竞争力。
📝 摘要(中文)
传统控制和系统工程中的状态估计需要大量的手动系统辨识或数据收集工作。然而,其他领域中基于Transformer的基础模型通过利用预训练的通用模型,降低了数据需求。最终,开发系统动力学的零样本基础模型可以大幅减少手动部署工作。虽然最近的研究表明,基于Transformer的端到端方法可以在未见过的系统上实现零样本性能,但它们仅限于训练期间见过的传感器模型。我们引入了基础模型无迹卡尔曼滤波器(FM-UKF),它通过UKF将基于Transformer的系统动力学模型与解析已知的传感器模型相结合,从而能够在不同的动力学中泛化,而无需为新的传感器配置进行重新训练。我们在一个具有复杂动力学的集装箱船模型的新基准上评估了FM-UKF,证明与具有近似系统知识的经典方法和端到端方法相比,它在精度、工作量和鲁棒性之间取得了有竞争力的平衡。该基准和数据集已开源,以进一步支持未来通过基础模型进行零样本状态估计的研究。
🔬 方法详解
问题定义:论文旨在解决状态估计中对大量数据和手动系统辨识的依赖问题。现有方法,特别是端到端的Transformer模型,虽然能在未见过的系统上实现零样本性能,但它们无法泛化到训练时未见过的传感器配置,限制了其应用范围。
核心思路:论文的核心思路是将基于Transformer的基础模型用于学习系统动力学,然后利用无迹卡尔曼滤波器(UKF)将学习到的动力学模型与解析已知的传感器模型相结合。这种方法允许模型在不同的系统动力学中泛化,而无需为新的传感器配置进行重新训练。
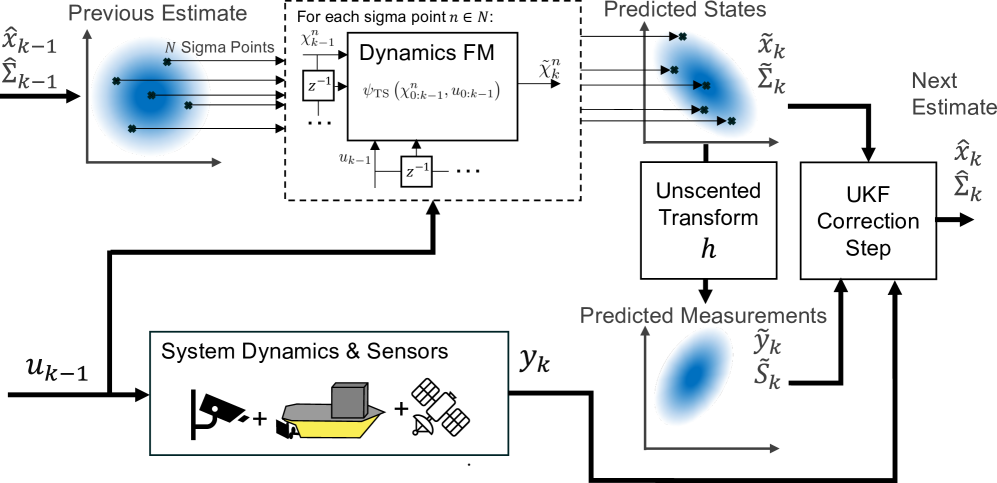
技术框架:FM-UKF的整体框架包括两个主要部分:1) 基于Transformer的系统动力学模型:该模型负责学习系统的状态转移函数。输入是当前状态和控制输入,输出是下一个状态的预测。2) 无迹卡尔曼滤波器(UKF):UKF负责融合来自Transformer模型的状态预测和来自传感器的测量值,以获得更准确的状态估计。UKF利用解析已知的传感器模型来处理测量更新步骤。
关键创新:该方法最重要的创新点在于将深度学习(Transformer)和经典的状态估计算法(UKF)相结合。Transformer负责学习复杂的系统动力学,而UKF负责处理测量噪声和不确定性,并利用已知的传感器模型进行状态更新。这种混合方法既能利用深度学习的强大表示能力,又能保证状态估计的稳定性和准确性。
关键设计:Transformer模型的具体结构(例如层数、注意力头数等)需要根据具体任务进行调整。UKF的关键参数包括过程噪声协方差矩阵和测量噪声协方差矩阵,这些参数需要根据系统的噪声特性进行调整。论文中可能还涉及一些数据预处理和后处理步骤,以提高模型的性能。
🖼️ 关键图片

📊 实验亮点
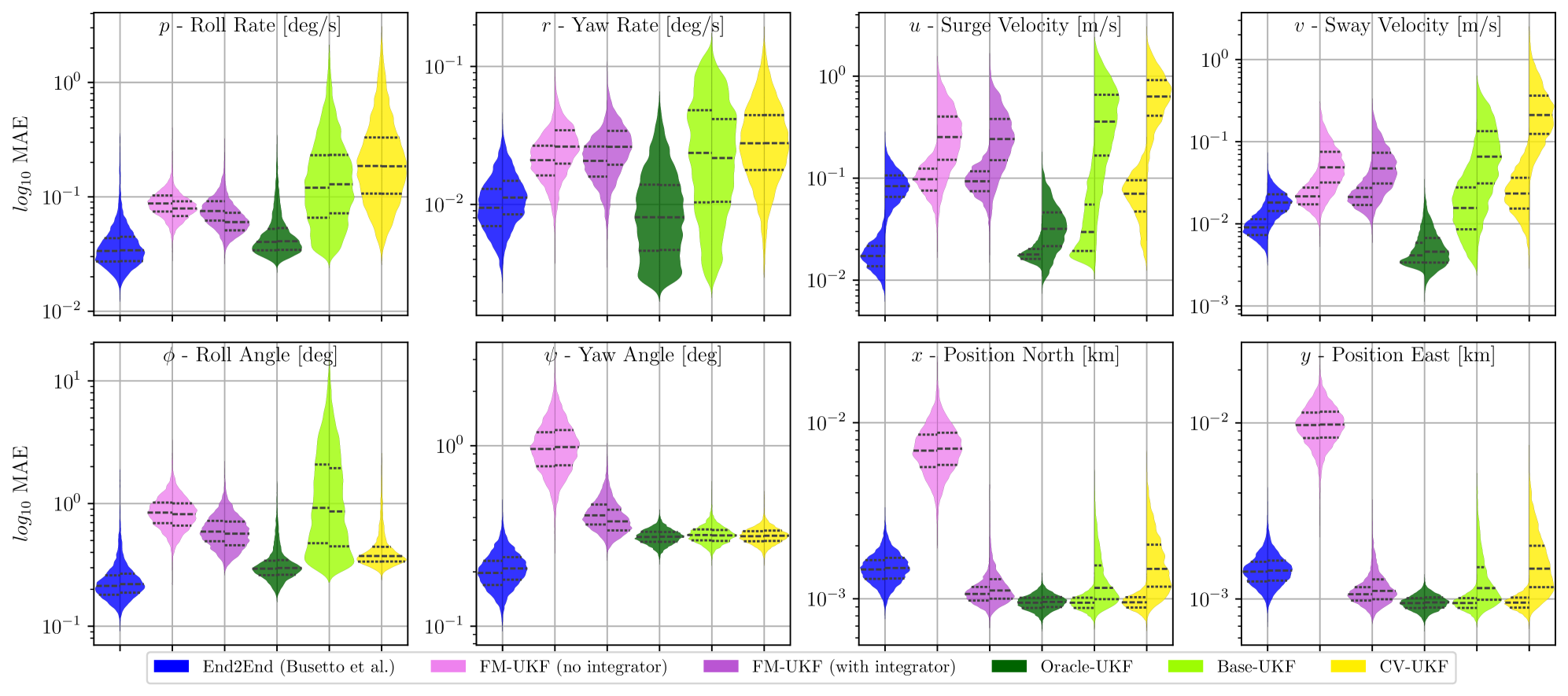
论文在一个新的集装箱船模型基准上评估了FM-UKF,结果表明,与传统的基于近似系统知识的方法和端到端方法相比,FM-UKF在精度、工作量和鲁棒性之间取得了有竞争力的平衡。具体的性能数据(例如状态估计误差、计算时间等)需要在论文中查找。该基准和数据集已开源,为未来的零样本状态估计研究提供了便利。
🎯 应用场景
该研究成果可应用于各种需要状态估计的控制系统,尤其是在系统动力学复杂且难以建模,或者传感器配置经常变化的场景中。例如,自主导航、机器人控制、过程控制等领域。该方法降低了对大量数据的依赖,减少了手动系统辨识的工作量,从而加速了控制系统的部署和维护。
📄 摘要(原文)
State estimation in control and systems engineering traditionally requires extensive manual system identification or data-collection effort. However, transformer-based foundation models in other domains have reduced data requirements by leveraging pre-trained generalist models. Ultimately, developing zero-shot foundation models of system dynamics could drastically reduce manual deployment effort. While recent work shows that transformer-based end-to-end approaches can achieve zero-shot performance on unseen systems, they are limited to sensor models seen during training. We introduce the foundation model unscented Kalman filter (FM-UKF), which combines a transformer-based model of system dynamics with analytically known sensor models via an UKF, enabling generalization across varying dynamics without retraining for new sensor configurations. We evaluate FM-UKF on a new benchmark of container ship models with complex dynamics, demonstrating a competitive accuracy, effort, and robustness trade-off compared to classical methods with approximate system knowledge and to an end-to-end approach. The benchmark and dataset are open sourced to further support future research in zero-shot state estimation via foundation models.