Avoidance of an unexpected obstacle without reinforcement learning: Why not using advanced control-theoretic tools?
作者: Cédric Join, Michel Fliess
分类: eess.SY, cs.RO, math.OC
发布日期: 2025-09-03
备注: IEEE 2025 - 13th International Conference on Systems and Control (ICSC) - October 22-24, 2025 - Marrakesh, Morocco
💡 一句话要点
提出基于扁平化控制和无模型预测控制的Dubins车辆避障方法,无需强化学习。
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: Dubins车辆 避障 扁平化控制 无模型预测控制 控制理论 无人驾驶 机器人
📋 核心要点
- 强化学习在避障任务中需要大量训练数据,计算成本高昂,且泛化能力可能不足。
- 采用基于扁平化控制和无模型预测控制相结合的方法,避免了对复杂环境的建模和大量数据训练的需求。
- 实验表明,该方法在Dubins车辆避障任务中表现出良好的鲁棒性和较低的计算负担,性能接近基于模型的方法。
📝 摘要(中文)
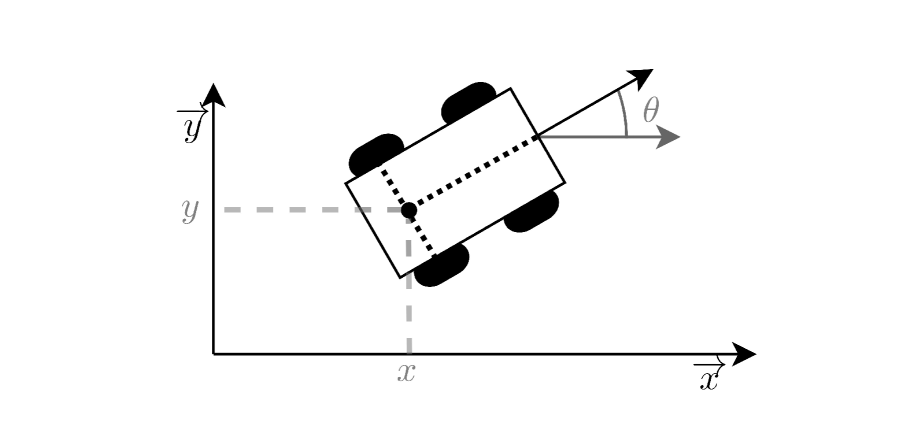
本文针对意外障碍物的避障问题,旨在替代强化学习(RL),因为强化学习“需要极其大量的试验才能学习任何新任务”(Yann LeCun)。我们使用经典的Dubins车辆,采用基于扁平化控制的方法,结合HEOL反馈设置和最新的无模型预测控制方法。这两种方法都通过了令人信服的计算机实验验证,其中基于模型的方法结果略好。它们对随机产生的失配/扰动表现出令人满意的鲁棒性,在无模型情况下表现更佳。这些特性可能难以通过当今流行的AI机器学习技术获得。最后,我们强调这两种方法都需要较低的计算负担。
🔬 方法详解
问题定义:论文旨在解决Dubins车辆在未知环境中,如何避免与意外出现的障碍物发生碰撞的问题。现有强化学习方法需要大量的训练数据和计算资源,并且在面对新的环境时泛化能力较弱。
核心思路:论文的核心思路是利用控制理论中的扁平化控制和无模型预测控制方法,直接设计控制策略,而无需通过强化学习进行训练。扁平化控制可以将非线性系统转化为线性系统,简化控制器的设计。无模型预测控制则可以直接利用系统的输入输出数据进行预测和控制,避免了对系统模型的依赖。
技术框架:该方法主要包含两个分支:基于扁平化控制结合HEOL反馈的控制器和无模型预测控制器。前者利用Dubins车辆的扁平化特性,设计控制器使其跟踪期望轨迹,并通过HEOL反馈提高鲁棒性。后者直接利用车辆的输入输出数据,建立预测模型,并根据预测结果优化控制输入。两种方法都旨在实现车辆在未知环境中的安全避障。
关键创新:该论文的关键创新在于将扁平化控制和无模型预测控制应用于Dubins车辆的避障问题,并成功地避免了对强化学习的依赖。与传统的基于模型的控制方法相比,无模型预测控制不需要精确的系统模型,具有更强的适应性和鲁棒性。
关键设计:在基于扁平化控制的方法中,关键在于选择合适的扁平化输出和设计HEOL反馈控制器。在无模型预测控制方法中,关键在于选择合适的预测模型和优化算法。论文中具体的技术细节(如HEOL反馈控制器的参数设置、预测模型的选择和优化算法)未详细描述,属于未知信息。
🖼️ 关键图片


📊 实验亮点
实验结果表明,基于扁平化控制和无模型预测控制的方法在Dubins车辆避障任务中表现出良好的性能和鲁棒性。虽然基于模型的方法略优,但无模型方法在面对随机扰动时表现出更强的适应性。两种方法都具有较低的计算负担,使其适用于实时控制。
🎯 应用场景
该研究成果可应用于无人驾驶车辆、移动机器人等领域,使其能够在复杂和未知的环境中安全地导航和避障。该方法降低了对环境建模和大量数据训练的需求,有望加速无人系统的部署和应用。
📄 摘要(原文)
This communication on collision avoidance with unexpected obstacles is motivated by some critical appraisals on reinforcement learning (RL) which "requires ridiculously large numbers of trials to learn any new task" (Yann LeCun). We use the classic Dubins' car in order to replace RL with flatness-based control, combined with the HEOL feedback setting, and the latest model-free predictive control approach. The two approaches lead to convincing computer experiments where the results with the model-based one are only slightly better. They exhibit a satisfactory robustness with respect to randomly generated mismatches/disturbances, which become excellent in the model-free case. Those properties would have been perhaps difficult to obtain with today's popular machine learning techniques in AI. Finally, we should emphasize that our two methods require a low computational burden.