Sequential Convex Programming for 6-DoF Powered Descent Guidance with Continuous-Time Compound State-Triggered Constraints
作者: Samet Uzun, Behcet Acikmese, John M. Carson
分类: eess.SY
发布日期: 2025-09-02
🔗 代码/项目: GITHUB
💡 一句话要点
提出一种基于序列凸规划的6自由度动力下降制导方法,保证连续时间复合状态触发约束
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 序列凸规划 动力下降制导 连续时间约束 状态触发约束 轨迹优化
📋 核心要点
- 动力下降制导(PDG)问题需要在满足复杂约束下实现精确着陆,现有方法难以保证连续时间约束的满足。
- 该论文提出结合D-GMSR和CT-SCvx的SCP框架,将离散时间逻辑规范转化为连续时间约束,并保证收敛性。
- 数值模拟验证了该框架的有效性,能够在满足连续时间约束的条件下,实现动力下降制导。
📝 摘要(中文)
本文提出了一种序列凸规划(SCP)框架,用于确保动力下降制导(PDG)问题中连续时间复合状态触发约束(逻辑规范的一个子集)的满足。该框架结合了广义均值平滑鲁棒性度量(D-GMSR)——一种为通过平滑函数表达离散时间时序和逻辑规范而量身定制的参数化技术,以及连续时间逐次凸化(CT-SCvx)方法——一种用于约束轨迹优化的实时解决方案,保证连续时间约束满足和收敛。D-GMSR参数化的时序和逻辑规范的平滑性使得可以使用鲁棒且高效的SCP算法解决由此产生的优化问题,同时保留理论保证。除了平滑性之外,参数化的规范是可靠且完整的,这意味着规范成立当且仅当参数化函数定义的约束得到满足。然后,应用CT-SCvx框架来解决参数化问题,包括:(1)连续时间路径约束满足的重构,(2)时间膨胀以将自由终点时间PDG问题转换为固定终点时间问题,(3)用于精确离散化的多重打靶法,(4)用于惩罚非凸约束的精确惩罚函数,以及(5)prox-linear方法——一种保证收敛的SCP算法,以解决由此产生的有限维非凸PDG问题。通过数值模拟证明了该框架的有效性。该实现可在https://github.com/UW-ACL/CT-cSTC获得。
🔬 方法详解
问题定义:论文旨在解决动力下降制导(PDG)问题,特别是在存在复杂的、由状态触发的约束条件时,如何保证在连续时间内这些约束都能得到满足。现有的方法,例如离散时间优化方法,难以保证在连续时间内的约束满足,可能导致实际执行时违反约束。此外,处理复杂的逻辑规范(如复合状态触发约束)也具有挑战性。
核心思路:论文的核心思路是将复杂的连续时间约束问题转化为一个序列凸规划(SCP)问题,通过迭代求解凸优化问题来逼近原问题的解。关键在于使用广义均值平滑鲁棒性度量(D-GMSR)来参数化离散时间时序和逻辑规范,将其转化为平滑函数,从而能够使用高效的SCP算法。同时,利用连续时间逐次凸化(CT-SCvx)方法,保证连续时间约束的满足和收敛性。
技术框架:整体框架包括以下几个主要步骤:1) 使用D-GMSR参数化复合状态触发约束;2) 利用CT-SCvx方法将连续时间PDG问题转化为序列凸规划问题;3) 采用时间膨胀将自由终点时间问题转化为固定终点时间问题;4) 使用多重打靶法进行精确离散化;5) 使用精确惩罚函数处理非凸约束;6) 使用prox-linear方法求解最终的有限维非凸问题。
关键创新:最重要的技术创新在于将D-GMSR和CT-SCvx结合,实现对连续时间复合状态触发约束的有效处理。D-GMSR能够将离散时间逻辑规范转化为平滑函数,使得可以使用SCP算法进行优化。CT-SCvx保证了连续时间约束的满足和收敛性。与现有方法相比,该方法能够更有效地处理复杂的约束条件,并保证解的质量。
关键设计:D-GMSR的具体参数选择会影响参数化规范的平滑性和鲁棒性。时间膨胀的比例需要根据具体问题进行调整,以保证优化问题的可行性和收敛速度。多重打靶法的打靶点数量会影响离散化的精度和计算复杂度。精确惩罚函数的惩罚系数需要仔细调整,以平衡约束违反和目标函数优化。
🖼️ 关键图片
📊 实验亮点
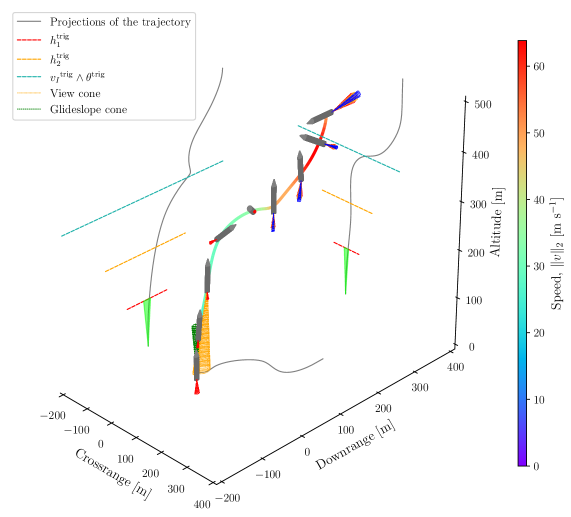
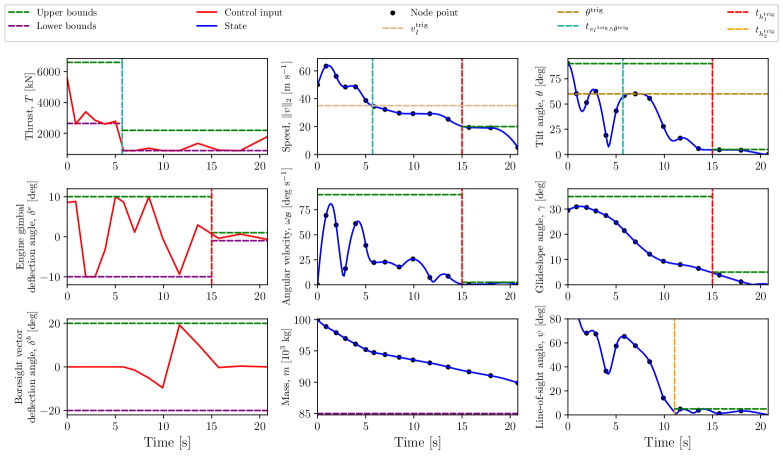
数值模拟结果表明,该框架能够有效地解决带有连续时间复合状态触发约束的动力下降制导问题。通过结合D-GMSR和CT-SCvx,该方法能够在保证连续时间约束满足的前提下,实现精确的轨迹优化。具体性能数据(如着陆精度、燃料消耗等)未在摘要中明确给出,但强调了框架的有效性。
🎯 应用场景
该研究成果可应用于航天器着陆、无人机路径规划、机器人运动控制等领域,尤其是在需要满足复杂时序逻辑约束的场景下。例如,在月球或火星着陆任务中,需要满足各种状态触发的约束条件,以确保着陆的安全性和精度。该方法还可以用于自主导航系统,提高其在复杂环境中的适应性和可靠性。
📄 摘要(原文)
This paper presents a sequential convex programming (SCP) framework for ensuring the continuous-time satisfaction of compound state-triggered constraints, a subset of logical specifications, in the powered descent guidance (PDG) problem. The proposed framework combines the generalized mean-based smooth robustness measure (D-GMSR), a parameterization technique tailored for expressing discrete-time temporal and logical specifications through smooth functions, with the continuous-time successive convexification (CT-SCvx) method, a real-time solution for constrained trajectory optimization that guarantees continuous-time constraint satisfaction and convergence. The smoothness of the temporal and logical specifications parameterized via D-GMSR enables solving the resulting optimization problem with robust and efficient SCP algorithms while preserving theoretical guarantees. In addition to their smoothness, the parameterized specifications are sound and complete, meaning the specification holds if and only if the constraint defined by the parameterized function is satisfied. The CT-SCvx framework is then applied to solve the parameterized problem, incorporating: (1) reformulation for continuous-time path constraint satisfaction, (2) time-dilation to transform the free-final-time PDG problem into a fixed-final-time problem, (3) multiple shooting for exact discretization, (4) exact penalty functions for penalizing nonconvex constraints, and (5) the prox-linear method, a convergence-guaranteed SCP algorithm, to solve the resulting finite-dimensional nonconvex PDG problem. The effectiveness of the framework is demonstrated through a numerical simulation. The implementation is available at https://github.com/UW-ACL/CT-cSTC