Task and Motion Planning of Dynamic Systems using Hyperproperties for Signal Temporal Logics
作者: Jianing Zhao, Bowen Ye, Xinyi Yu, Rupak Majumdar, Xiang Yin
分类: eess.SY
发布日期: 2025-09-02 (更新: 2025-09-03)
💡 一句话要点
提出基于超性质和信号时序逻辑的动态系统任务与运动规划方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 任务与运动规划 信号时序逻辑 超性质 反例引导综合 动态系统
📋 核心要点
- 现有STL控制方法主要关注单个轨迹的属性满足,难以处理信息流控制等涉及多轨迹的超性质。
- 提出一种基于HyperSTL的规划框架,采用递归反例引导综合方法,有效处理带交替量词的超性质规范。
- 通过安全保持和无歧义规划的案例研究,验证了HyperSTL规划框架的有效性,并可扩展到模型检查。
📝 摘要(中文)
本文研究了在信号时序逻辑(STL)规范下,动态系统的任务与运动规划问题。现有的STL控制综合方法主要集中于生成满足单个执行轨迹属性的规划。本文考虑了针对一组可能轨迹评估的超性质规划问题,这些超性质自然出现在信息流控制问题中。具体而言,我们研究离散时间动态系统,并采用最近开发的超性质时序逻辑HyperSTL作为新的规划目标。为了解决这个问题,我们提出了一种新颖的递归反例引导综合方法,能够有效地处理具有多个交替量词的HyperSTL规范。该方法不仅适用于规划,还可扩展到离散时间动态系统的HyperSTL模型检查。最后,我们通过安全保持规划和无歧义规划的案例研究,证明了所提出的HyperSTL规划框架的有效性。
🔬 方法详解
问题定义:论文旨在解决动态系统在满足HyperSTL规范下的任务与运动规划问题。现有方法主要关注单个轨迹上的STL属性,无法处理涉及多个轨迹的超性质,例如信息流安全、隐私保护等。这些超性质需要对系统可能产生的一组轨迹进行约束,而现有方法无法有效处理此类问题。
核心思路:论文的核心思路是将HyperSTL引入动态系统的任务与运动规划中,利用HyperSTL描述系统需要满足的超性质。通过将规划问题转化为HyperSTL的满足性问题,并采用反例引导综合的方法,逐步细化规划策略,直到找到满足HyperSTL规范的解。
技术框架:整体框架是一个递归的反例引导综合流程。首先,给定一个初始的规划策略,系统模拟执行并生成一组轨迹。然后,使用HyperSTL模型检查器验证这些轨迹是否满足HyperSTL规范。如果满足,则规划成功;否则,模型检查器会生成一个反例,即一组违反HyperSTL规范的轨迹。接下来,利用反例信息,对规划策略进行改进,并重复上述过程,直到找到满足HyperSTL规范的规划策略。
关键创新:最重要的创新在于将HyperSTL引入动态系统的任务与运动规划中,并提出了一种有效的递归反例引导综合方法。该方法能够处理具有多个交替量词的HyperSTL规范,这在现有的STL控制综合方法中是难以实现的。此外,该方法还可扩展到离散时间动态系统的HyperSTL模型检查。
关键设计:论文中关键的设计包括HyperSTL规范的编码方式、反例的生成和分析方法、以及规划策略的改进策略。具体的参数设置和损失函数取决于具体的应用场景和动态系统模型。论文中通过案例研究展示了如何在安全保持规划和无歧义规划中应用该方法。
🖼️ 关键图片


📊 实验亮点
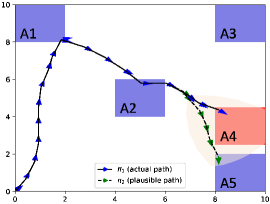
论文通过安全保持规划和无歧义规划两个案例研究验证了所提出HyperSTL规划框架的有效性。实验结果表明,该方法能够有效地处理具有多个交替量词的HyperSTL规范,并生成满足安全和无歧义要求的规划策略。虽然论文中没有给出具体的性能数据和提升幅度,但案例研究表明该方法在解决复杂任务规划问题方面具有潜力。
🎯 应用场景
该研究成果可应用于安全攸关的机器人系统、自动驾驶系统等领域。例如,在多机器人协作任务中,可以利用HyperSTL规范保证信息流安全,防止敏感信息泄露。在自动驾驶系统中,可以利用HyperSTL规范保证系统在各种场景下的安全性,例如避免歧义行为,确保乘客安全。该研究为开发更安全、可靠的动态系统提供了新的理论和方法。
📄 摘要(原文)
We investigate the task and motion planning problem for dynamical systems under signal temporal logic (STL) specifications. Existing works on STL control synthesis mainly focus on generating plans that satisfy properties over a single executed trajectory. In this work, we consider the planning problem for hyperproperties evaluated over a set of possible trajectories, which naturally arise in information-flow control problems. Specifically, we study discrete-time dynamical systems and employ the recently developed temporal logic HyperSTL as the new objective for planning. To solve this problem, we propose a novel recursive counterexample-guided synthesis approach capable of effectively handling HyperSTL specifications with multiple alternating quantifiers. The proposed method is not only applicable to planning but also extends to HyperSTL model checking for discrete-time dynamical systems. Finally, we present case studies on security-preserving planning and ambiguity-free planning to demonstrate the effectiveness of the proposed HyperSTL planning framework.