High-Performance Trajectory Tracking MPC for Quadcopters with Coupled Time-Varying Constraints and Stability Proofs
作者: Maedeh Izadi, A. T. J. R. Cobbenhagen, R. L. Sommer, A. R. P. Andrien, E. Lefeber, W. P. M. H. Heemels
分类: eess.SY
发布日期: 2025-09-01
备注: 9 pages, 4 figures, submitted to 2025 IEEE 64th Conference on Decision and Control (CDC)
💡 一句话要点
提出一种高性能轨迹跟踪MPC方法,解决四旋翼飞行器耦合时变约束问题,并提供稳定性证明。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四旋翼飞行器 轨迹跟踪 模型预测控制 时变约束 级联控制
📋 核心要点
- 现有四旋翼轨迹跟踪方法在处理复杂时变耦合约束时,往往过于保守,限制了飞行器的性能。
- 本文提出一种基于MPC的级联控制结构,显式考虑耦合时变约束,生成加速度参考,并由内环控制器跟踪。
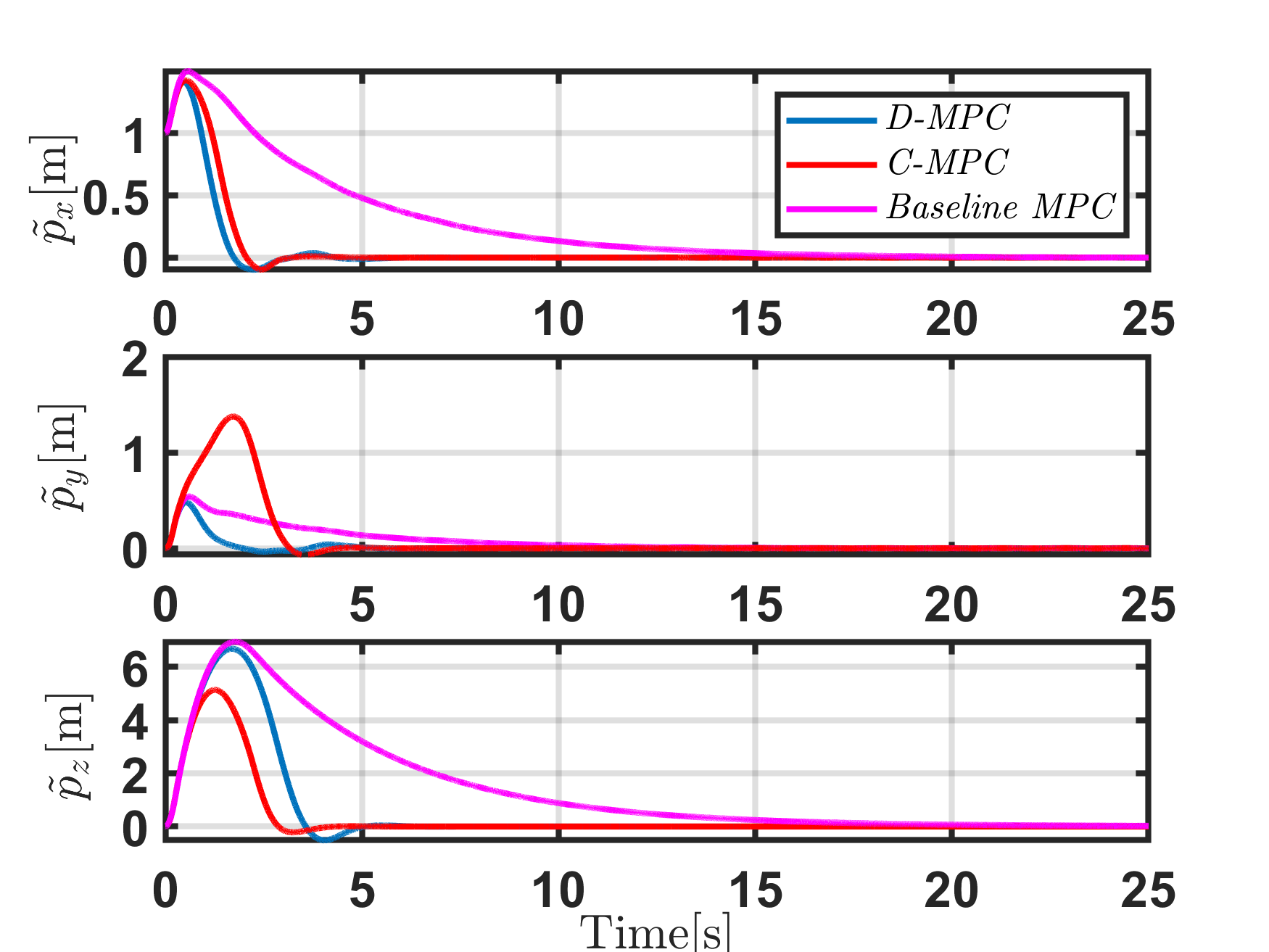
- 数值仿真表明,该方法在保证稳定性的前提下,实现了更精确和快速的轨迹跟踪,性能优于现有方法。
📝 摘要(中文)
本文提出了一种级联控制结构来解决四旋翼飞行器的轨迹跟踪问题,确保状态跟踪误差动态系统的全局一致渐近稳定性。外环采用基于12维预测模型的MPC策略,显式地考虑了时变耦合约束,其中多个变量相互依赖且需要一起处理。外环控制器生成加速度参考,然后将其转换为姿态和角速度参考,随后由非线性内环控制器跟踪。数值仿真验证了该方法的有效性,通过施加比现有方法更宽松的约束,在保证稳定性的同时,展示了在精确和快速跟踪方面的增强性能。
🔬 方法详解
问题定义:本文旨在解决四旋翼飞行器在存在复杂时变耦合约束下的轨迹跟踪问题。现有方法通常采用保守的约束条件来保证稳定性,这限制了飞行器的动态性能,例如快速性和精确性。因此,如何在满足约束条件的同时,提高轨迹跟踪的性能是本文要解决的关键问题。
核心思路:本文的核心思路是采用一种级联控制结构,将轨迹跟踪问题分解为外环的MPC控制和内环的姿态控制。外环MPC负责生成加速度参考,该参考考虑了时变耦合约束,并被设计成能够保证整体系统的稳定性。内环控制器则负责跟踪外环生成的姿态和角速度参考。
技术框架:该方法采用级联控制结构,包括以下几个主要模块:1) 外环MPC控制器:基于12维预测模型,显式考虑时变耦合约束,生成加速度参考。2) 参考转换模块:将加速度参考转换为姿态和角速度参考。3) 内环非线性控制器:跟踪姿态和角速度参考,控制四旋翼飞行器的姿态。4) 四旋翼飞行器动力学模型:用于仿真和验证控制器的性能。
关键创新:本文的关键创新在于:1) 提出了一种能够显式处理时变耦合约束的MPC策略,避免了传统方法中过于保守的约束条件。2) 提供了整体系统的稳定性证明,保证了在复杂约束下轨迹跟踪的稳定性。3) 采用级联控制结构,将轨迹跟踪问题分解为外环的MPC控制和内环的姿态控制,简化了控制器的设计。
关键设计:外环MPC控制器的关键设计包括:1) 12维预测模型的选择,需要充分考虑四旋翼飞行器的动力学特性。2) 时变耦合约束的建模,需要准确描述变量之间的依赖关系。3) MPC的优化目标函数的设计,需要在跟踪性能和控制能量之间进行权衡。4) 内环控制器的设计,需要保证对姿态和角速度参考的快速准确跟踪。
🖼️ 关键图片


📊 实验亮点
数值仿真结果表明,该方法在保证稳定性的前提下,实现了更精确和快速的轨迹跟踪。与现有方法相比,该方法能够施加更宽松的约束条件,从而提高了飞行器的动态性能。具体的性能提升数据(例如跟踪误差的减小量、跟踪速度的提高量)需要在论文中查找。
🎯 应用场景
该研究成果可应用于无人机自主飞行、物流配送、环境监测、灾害救援等领域。通过提高四旋翼飞行器在复杂环境下的轨迹跟踪性能,可以使其更好地完成各种任务,例如在狭窄空间内进行精确操作,或者在强风等干扰下保持稳定的飞行。
📄 摘要(原文)
In this paper, we present a cascade control structure to address the trajectory tracking problem for quadcopters, ensuring uniform global asymptotic stability of the state tracking error dynamics. An MPC strategy based on a 12-dimensional prediction model is proposed for the outer loop, explicitly accounting for time-varying coupled constraints, where multiple variables are interdependent and need to be handled together. The outer-loop controller generates an acceleration reference, which is then converted into attitude and angular velocity references, later tracked by a nonlinear inner-loop controller. Numerical simulations validate the approach, demonstrating enhanced performance in precise and fast tracking by imposing less conservative constraints than existing approaches, while still guaranteeing stability.