Integrated Take-off Management and Trajectory Optimization for Merging Control in Urban Air Mobility Corridors
作者: Yingqi Liu, Tianlu Pan, Jingjun Tan, Renxin Zhong, Can Chen
分类: math.OC, eess.SY
发布日期: 2025-08-21
备注: 31 pages
💡 一句话要点
针对城市空中交通走廊,提出集成起飞管理和轨迹优化的汇流控制方法。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 城市空中交通 起飞管理 轨迹优化 汇流控制 空域设计
📋 核心要点
- 城市空中交通的起飞和汇流阶段是关键,但现有方法难以在保证安全的同时实现高效的起飞和汇流。
- 论文提出一种分层协调起飞和汇流管理(HCTMM)策略,通过新颖的起飞空域设计简化轨迹优化,并采用调度算法和轨迹优化策略。
- 仿真结果表明,HCTMM策略显著提高了运营效率,降低了计算负担,同时确保了各种走廊交通条件下的安全性,并具有良好的可扩展性。
📝 摘要(中文)
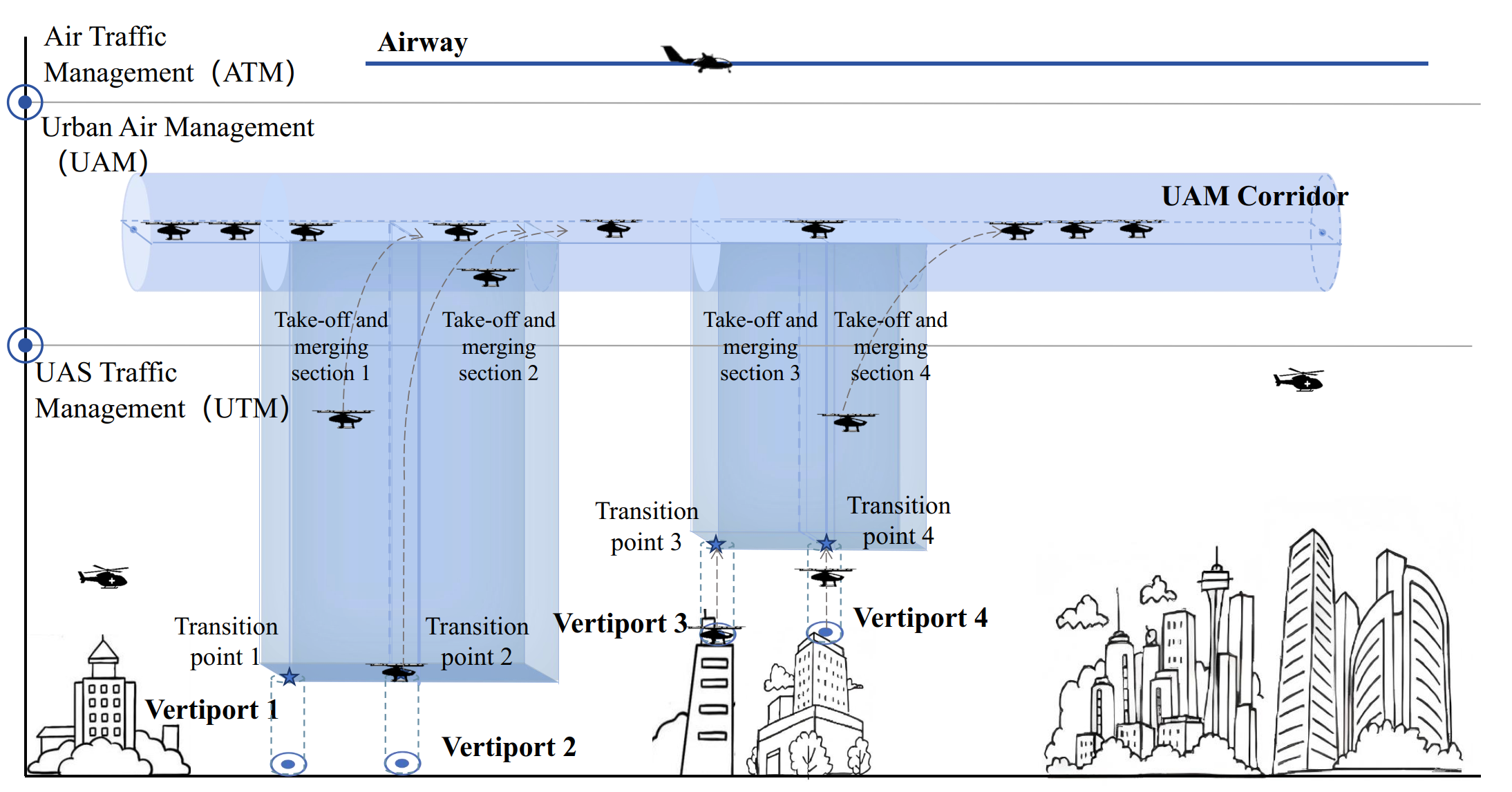
城市空中交通(UAM)具有革新日常交通的潜力,提供快速高效的空中移动服务。起飞和汇流阶段对于空中走廊运营至关重要,需要协调起飞飞机和走廊交通,同时确保安全和无缝过渡。本文提出了一种集成的起飞管理和轨迹优化方法,用于UAM走廊中的汇流控制。首先,我们引入了一种新颖的起飞空域设计。据我们所知,本文是首次提出结构化的起飞空域设计。基于起飞空域设计,我们设计了一种分层协调起飞和汇流管理(HCTMM)策略。具体而言,起飞空域设计可以简化飞机动力学,从而降低轨迹优化问题的维度,同时减轻避障的复杂性。HCTMM策略严格确保安全,提高起飞和汇流操作的效率。在战术层面,调度算法协调飞机起飞时间并选择动态汇流点,以减少冲突并确保平稳的起飞和汇流过程。在操作层面,轨迹优化策略确保每架飞机高效地到达动态汇流点,同时满足安全约束。仿真结果表明,与具有固定或动态汇流点的代表性策略相比,HCTMM策略显著提高了运营效率,降低了计算负担,同时确保了各种走廊交通条件下的安全性。进一步的结果证实了HCTMM策略的可扩展性以及所提出的起飞空域设计所实现的计算效率。
🔬 方法详解
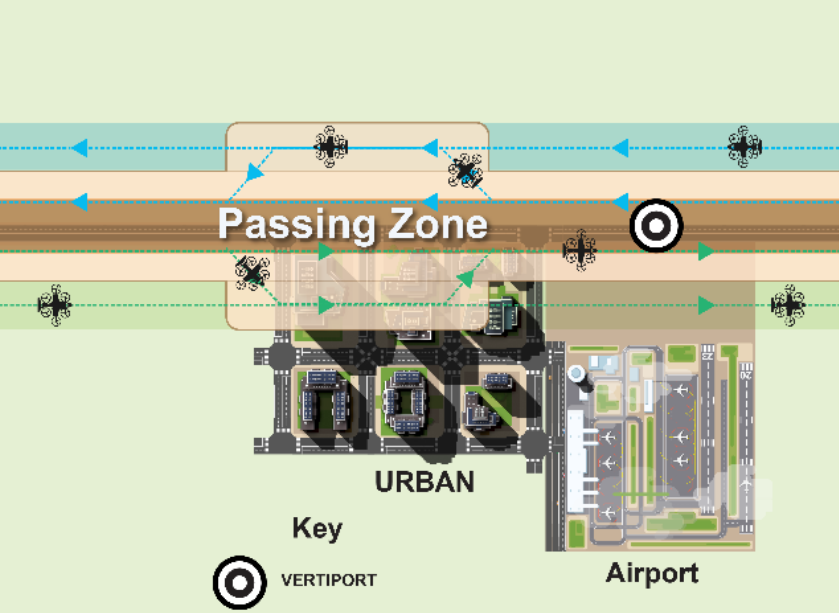
问题定义:论文旨在解决城市空中交通(UAM)走廊中起飞和汇流阶段的效率和安全问题。现有方法通常采用固定或简单的动态汇流点,难以适应复杂的交通状况,导致效率低下或安全风险。此外,复杂的飞机动力学和避障需求增加了轨迹优化的难度和计算负担。
核心思路:论文的核心思路是通过结构化的起飞空域设计来简化飞机动力学和避障问题,从而降低轨迹优化的维度。同时,采用分层协调的起飞和汇流管理策略,在战术层面通过调度算法协调起飞时间和选择动态汇流点,在操作层面通过轨迹优化策略确保飞机高效安全地到达汇流点。
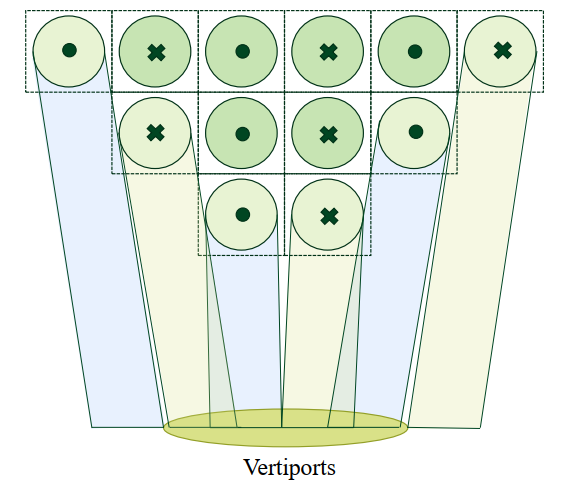
技术框架:论文提出的技术框架主要包含以下几个模块: 1. 起飞空域设计:设计结构化的起飞空域,简化飞机动力学和避障问题。 2. 战术层调度算法:协调飞机起飞时间,选择动态汇流点,减少冲突。 3. 操作层轨迹优化策略:确保飞机高效安全地到达动态汇流点,满足安全约束。 4. 分层协调管理(HCTMM):将战术层和操作层结合,实现整体的起飞和汇流管理。
关键创新:论文的关键创新在于: 1. 首次提出结构化的起飞空域设计:通过预定义的空域结构,简化了飞机动力学和避障问题,降低了轨迹优化的复杂度。 2. 分层协调的起飞和汇流管理策略(HCTMM):将调度和轨迹优化相结合,实现了更高效和安全的起飞和汇流过程。
关键设计: 1. 起飞空域设计:具体的设计细节未知,但强调了结构化设计以简化动力学和避障。 2. 调度算法:算法细节未知,但目标是协调起飞时间和选择动态汇流点。 3. 轨迹优化策略:策略细节未知,但目标是确保飞机高效安全地到达汇流点,并满足安全约束。
🖼️ 关键图片
📊 实验亮点
仿真结果表明,与具有固定或动态汇流点的代表性策略相比,HCTMM策略显著提高了运营效率,降低了计算负担,同时确保了各种走廊交通条件下的安全性。具体提升幅度和性能数据未知,但强调了HCTMM策略的可扩展性以及所提出的起飞空域设计所实现的计算效率。
🎯 应用场景
该研究成果可应用于未来的城市空中交通管理系统,提升UAM的运营效率和安全性。通过优化起飞和汇流过程,可以减少航班延误,降低运营成本,并提高乘客的出行体验。此外,该方法还可以扩展到其他空中交通管理场景,例如无人机配送和空中出租车服务。
📄 摘要(原文)
Urban Air Mobility (UAM) has the potential to revolutionize daily transportation, offering rapid and efficient aerial mobility services. Take-off and merging phases are critical for air corridor operations, requiring the coordination of take-off aircraft and corridor traffic while ensuring safety and seamless transition. This paper proposes an integrated take-off management and trajectory optimization for merging control in UAM corridors. We first introduce a novel take-off airspace design. To our knowledge, this paper is one of the first to propose a structured design for take-off airspace. Based on the take-off airspace design, we devise a hierarchical coordinated take-off and merging management (HCTMM) strategy. To be specific, the take-off airspace design can simplify aircraft dynamics and thus reduce the dimensionality of the trajectory optimization problem whilst mitigating obstacle avoidance complexities. The HCTMM strategy strictly ensures safety and improves the efficiency of take-off and merging operations. At the tactical level, a scheduling algorithm coordinates aircraft take-off times and selects dynamic merging points to reduce conflicts and ensure smooth take-off and merging processes. At the operational level, a trajectory optimization strategy ensures that each aircraft reaches the dynamic merging point efficiently while satisfying safety constraints. Simulation results show that, compared to representative strategies with fixed or dynamic merging points, the HCTMM strategy significantly improves operational efficiency and reduces computational burden, while ensuring safety under various corridor traffic conditions. Further results confirm the scalability of the HCTMM strategy and the computational efficiency enabled by the proposed take-off airspace design.