Data-Driven Motion Planning for Uncertain Nonlinear Systems
作者: Babak Esmaeili, Hamidreza Modares, Stefano Di Cairano
分类: eess.SY, cs.LG, cs.RO, math.OC
发布日期: 2025-07-31
💡 一句话要点
提出一种数据驱动的运动规划框架,用于解决不确定非线性系统的安全轨迹生成问题。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 数据驱动 运动规划 非线性系统 不变集 线性矩阵不等式
📋 核心要点
- 传统运动规划方法依赖精确的系统动力学模型,但在不确定和非线性系统中难以应用。
- 该论文提出一种数据驱动方法,仅需数据即可计算安全区域和设计控制器,无需系统动力学模型。
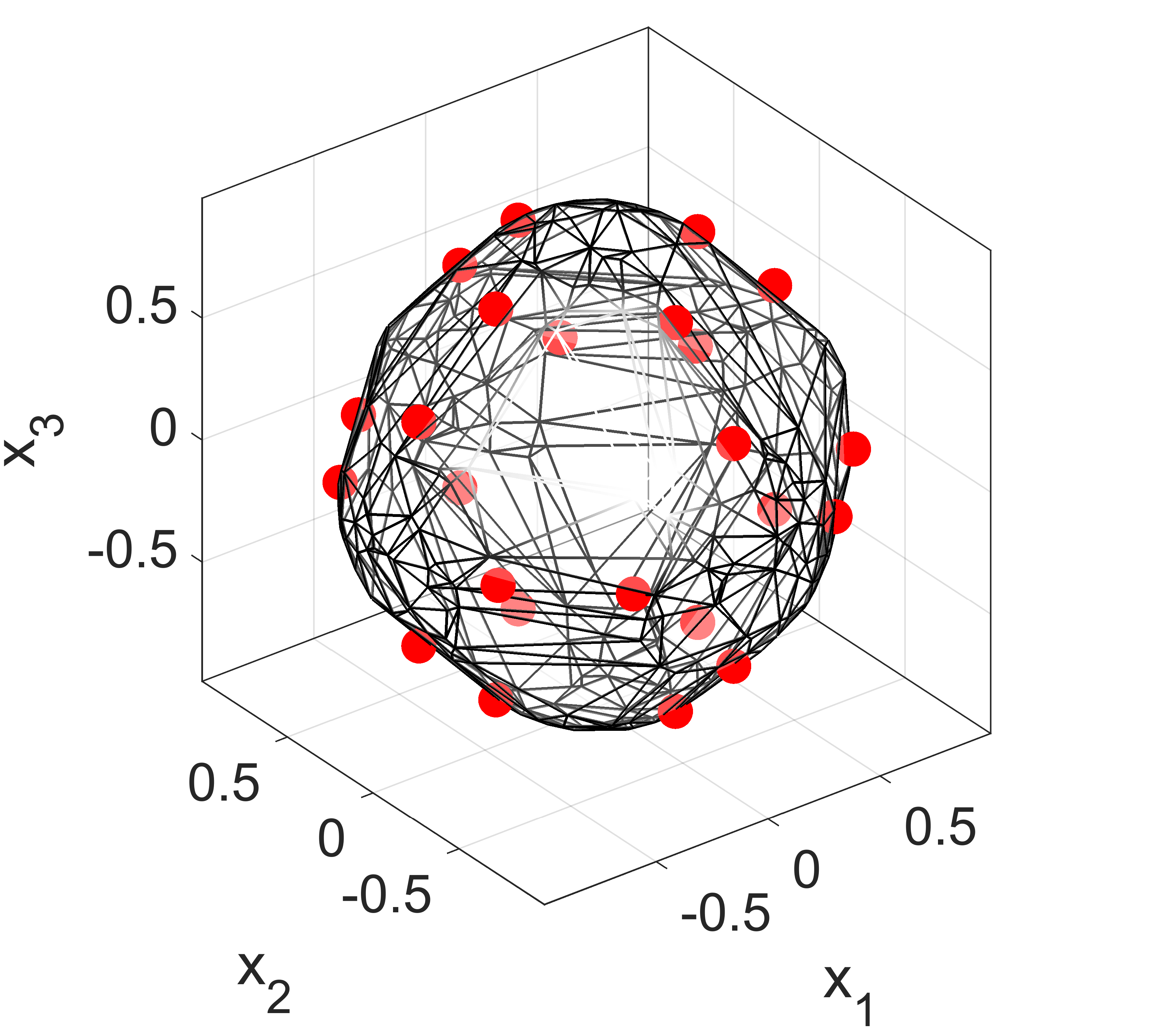
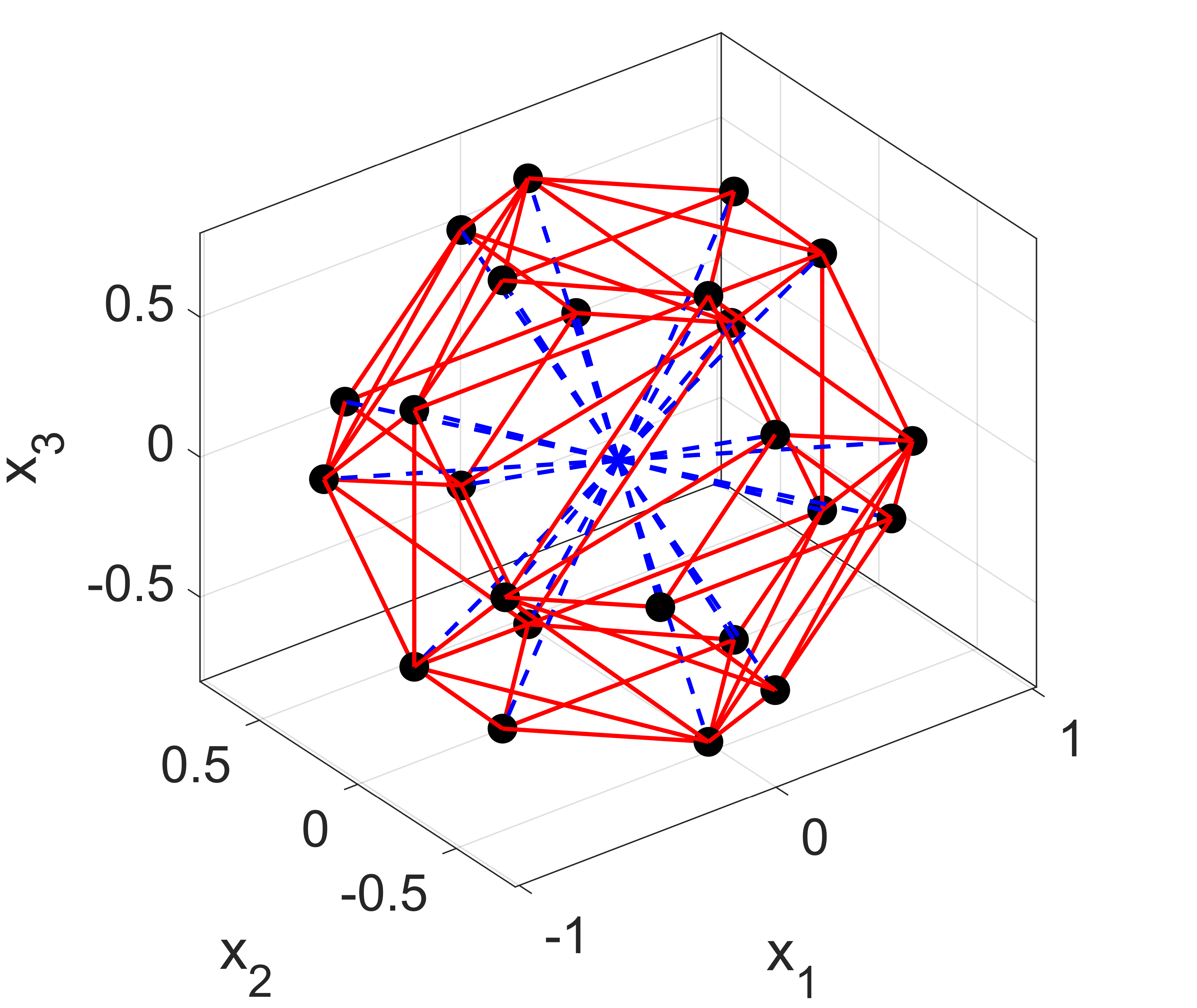
- 仿真结果表明,该方法能够为复杂非线性系统生成安全且动态可行的路径。
📝 摘要(中文)
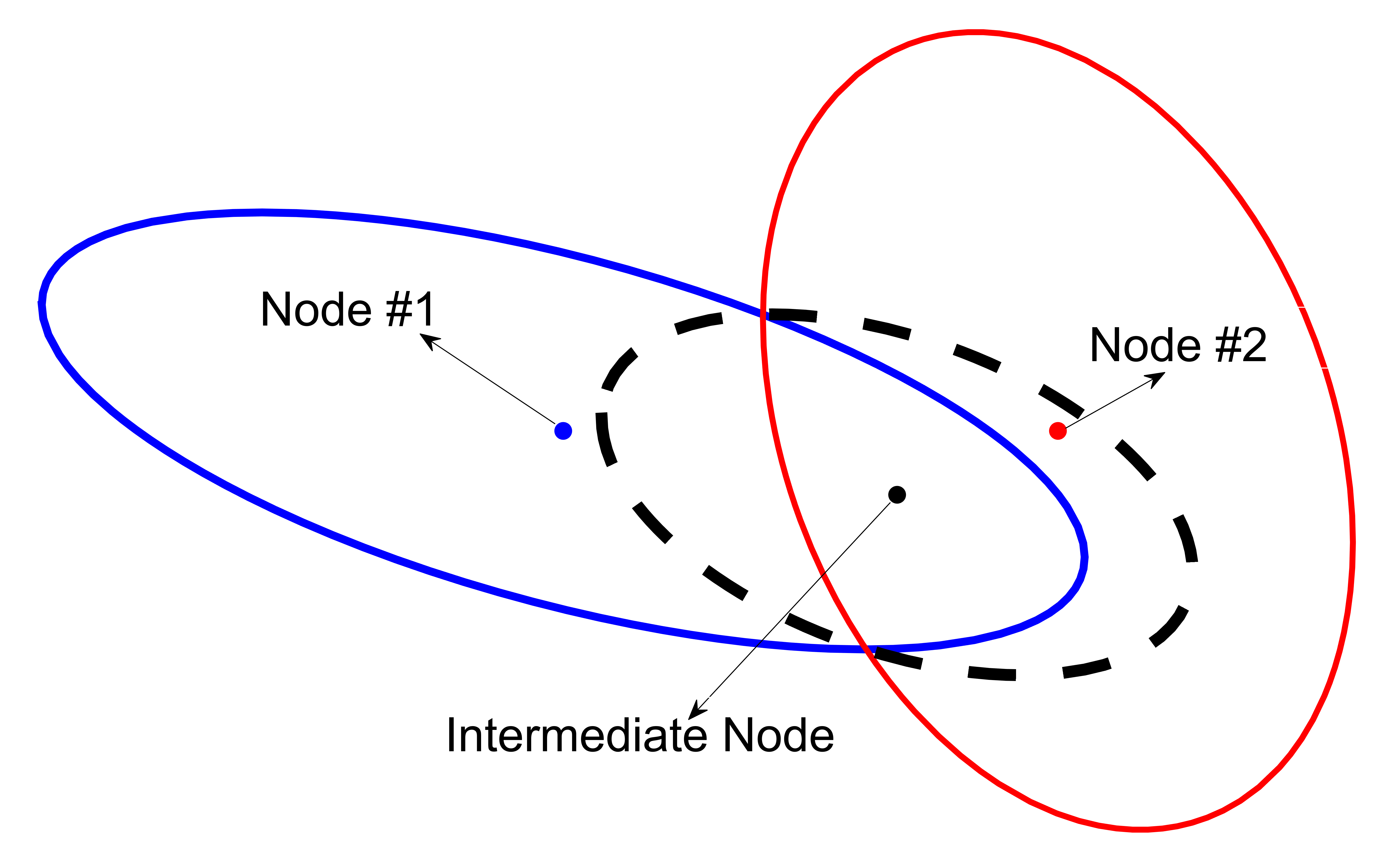
本文提出了一种数据驱动的非线性系统运动规划框架,该框架构建了一系列重叠的不变多胞形。算法在每个随机采样的航路点附近识别出一个凸的可容许区域,并求解数据驱动的线性矩阵不等式问题,以学习多个椭球不变集及其局部状态反馈增益。然后,通过插值增益获得的分段仿射控制器下,这些椭球的凸包仍然是不变的,并用一个多胞形来近似。通过验证连续凸包多胞形的交集并引入中间节点以实现平滑过渡,确保节点之间的安全过渡。控制增益通过基于单纯形的插值实时插值,使状态在整个运动过程中保持在不变多胞形内。与依赖系统动力学模型的传统方法不同,我们的方法只需要数据来计算安全区域和设计状态反馈控制器。通过仿真验证了该方法的有效性,证明了该方法在为复杂的非线性系统实现安全、动态可行的路径方面的有效性。
🔬 方法详解
问题定义:针对不确定非线性系统,传统运动规划方法依赖精确的系统动力学模型,这在实际应用中往往难以获得或计算成本高昂。因此,如何在缺乏精确模型的情况下,为非线性系统生成安全、动态可行的运动轨迹是一个挑战。现有方法通常需要对系统进行简化或近似,导致性能下降或安全性降低。
核心思路:该论文的核心思路是利用数据驱动的方法,直接从系统数据中学习安全区域和控制策略,而无需依赖精确的系统动力学模型。通过随机采样航路点,并在每个航路点附近学习局部不变集和控制增益,然后将这些局部信息组合成全局的安全轨迹。
技术框架:该方法主要包含以下几个阶段:1) 随机采样航路点;2) 在每个航路点附近,识别凸的可容许区域;3) 求解数据驱动的线性矩阵不等式(LMI)问题,学习椭球不变集和局部状态反馈增益;4) 构建椭球不变集的凸包,并用多胞形近似;5) 验证连续多胞形的交集,确保安全过渡,必要时插入中间节点;6) 通过单纯形插值实时计算控制增益,保持状态在不变多胞形内。
关键创新:该方法最重要的创新在于完全依赖数据驱动,无需系统动力学模型。通过学习局部不变集和控制增益,并将其组合成全局安全轨迹,实现了对不确定非线性系统的运动规划。与传统方法相比,该方法更加灵活,能够适应复杂的系统动态。
关键设计:关键设计包括:1) 使用线性矩阵不等式(LMI)来求解椭球不变集和控制增益,保证了计算的可行性;2) 使用凸包和多胞形近似来简化安全区域的表示,降低了计算复杂度;3) 使用单纯形插值来实现控制增益的平滑过渡,保证了控制的连续性。
🖼️ 关键图片
📊 实验亮点
该论文通过仿真验证了所提出方法的有效性。仿真结果表明,该方法能够为复杂的非线性系统生成安全、动态可行的路径。与依赖系统动力学模型的方法相比,该方法在模型不确定性较高的情况下表现出更好的鲁棒性和适应性。虽然论文中没有给出具体的性能数据和对比基线,但仿真结果足以证明该方法在解决不确定非线性系统运动规划问题上的潜力。
🎯 应用场景
该研究成果可应用于机器人导航、自动驾驶、飞行器控制等领域,尤其适用于系统动力学模型难以获取或不确定的复杂环境。例如,在未知地形下的无人车路径规划、复杂气流环境下的无人机轨迹跟踪等场景,该方法能够提供安全可靠的运动规划方案,具有重要的实际应用价值和广阔的应用前景。
📄 摘要(原文)
This paper proposes a data-driven motion-planning framework for nonlinear systems that constructs a sequence of overlapping invariant polytopes. Around each randomly sampled waypoint, the algorithm identifies a convex admissible region and solves data-driven linear-matrix-inequality problems to learn several ellipsoidal invariant sets together with their local state-feedback gains. The convex hull of these ellipsoids, still invariant under a piece-wise-affine controller obtained by interpolating the gains, is then approximated by a polytope. Safe transitions between nodes are ensured by verifying the intersection of consecutive convex-hull polytopes and introducing an intermediate node for a smooth transition. Control gains are interpolated in real time via simplex-based interpolation, keeping the state inside the invariant polytopes throughout the motion. Unlike traditional approaches that rely on system dynamics models, our method requires only data to compute safe regions and design state-feedback controllers. The approach is validated through simulations, demonstrating the effectiveness of the proposed method in achieving safe, dynamically feasible paths for complex nonlinear systems.