Dual-Channel Adaptive NMPC for Quadrotor under Instantaneous Impact and Payload Disturbances
作者: Xinqi Chen, Xiuxian Li, Min Meng
分类: eess.SY
发布日期: 2025-07-21
💡 一句话要点
提出双通道自适应NMPC,解决四旋翼飞行器在冲击和负载扰动下的目标抓取控制问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四旋翼飞行器 非线性模型预测控制 模型参考自适应控制 目标抓取 冲击力 负载扰动 双通道控制 自适应控制
📋 核心要点
- 四旋翼飞行器抓取目标越来越受欢迎,但现有研究主要集中在抓取轻量级物体,忽略了抓取重物时的冲击和负载不确定性。
- DCA-NMPC通过级联非线性模型预测控制和双通道模型参考自适应控制器,实现对冲击的抵抗和对不确定惯性参数的适应。
- 数值仿真实验验证了DCA-NMPC在四旋翼飞行器抓取目标物体时,抵抗冲击和适应负载扰动的有效性。
📝 摘要(中文)
本文提出了一种新颖的控制架构,即双通道自适应非线性模型预测控制(DCA-NMPC),旨在解决四旋翼飞行器抓取目标物体时遇到的挑战。该架构将非线性模型预测控制与两个低层模型参考自适应控制器级联,能够抵抗剧烈冲击并适应不确定的惯性参数。通过数值仿真实验验证了所提出方法的有效性。
🔬 方法详解
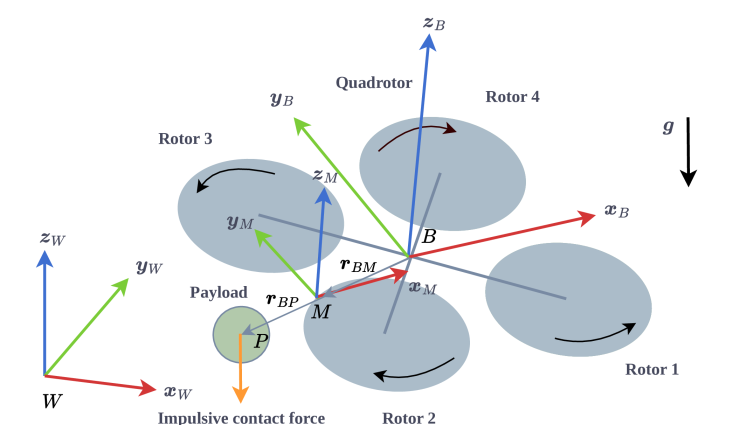
问题定义:四旋翼飞行器在抓取具有一定质量的目标物体时,会产生瞬时接触力,同时抓取后负载的不确定性也会对四旋翼飞行器的控制带来显著挑战。现有的方法在处理此类问题时,难以同时兼顾冲击力和负载扰动,导致控制性能下降甚至系统不稳定。
核心思路:论文的核心思路是将非线性模型预测控制(NMPC)与模型参考自适应控制(MRAC)相结合,构建一个双通道的控制架构。NMPC负责生成全局轨迹,MRAC负责局部自适应控制,从而实现对冲击和负载扰动的鲁棒性。双通道设计允许分别处理位置和姿态控制,提高控制精度和稳定性。
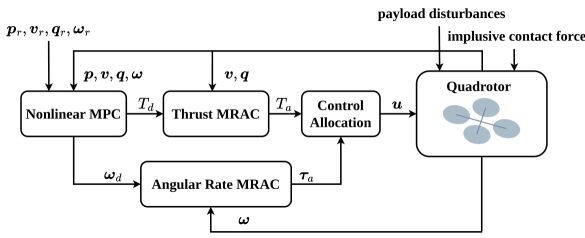
技术框架:DCA-NMPC的整体架构包含以下几个主要模块:1) 非线性模型预测控制器(NMPC):基于四旋翼飞行器的非线性动力学模型,预测未来一段时间内的状态,并优化控制输入,生成全局轨迹。2) 双通道模型参考自适应控制器(MRAC):包含两个独立的MRAC控制器,分别用于位置控制和姿态控制。每个MRAC控制器根据参考模型和实际状态之间的误差,自适应地调整控制参数,以实现对冲击和负载扰动的补偿。3) 状态估计器:用于估计四旋翼飞行器的状态,包括位置、速度、姿态和角速度。
关键创新:该方法的主要创新在于双通道自适应控制架构的设计,它将NMPC的全局优化能力与MRAC的局部自适应能力相结合,实现了对冲击和负载扰动的有效抑制。与传统的单通道控制方法相比,DCA-NMPC能够更好地处理复杂环境下的控制问题。此外,将MRAC应用于四旋翼飞行器的控制,并针对冲击和负载扰动进行了专门的设计,也是一个创新点。
关键设计:NMPC中,需要选择合适的预测时域和控制时域,并设计合适的代价函数,以实现期望的控制性能。MRAC中,需要选择合适的参考模型和自适应律,以保证系统的稳定性和收敛速度。双通道的设计需要仔细考虑位置控制和姿态控制之间的耦合关系,并进行合理的解耦。状态估计器的精度直接影响控制性能,需要选择合适的传感器和滤波算法。
🖼️ 关键图片
📊 实验亮点
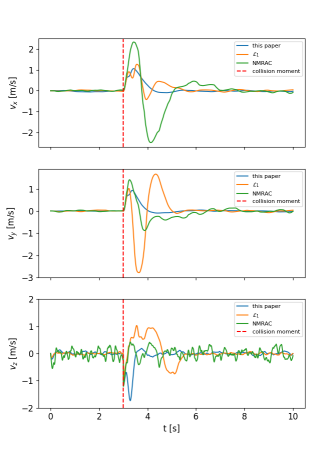
数值仿真实验表明,所提出的DCA-NMPC能够有效地抵抗冲击和适应负载扰动。与传统的NMPC相比,DCA-NMPC在抓取目标物体后,能够更快地恢复到稳定状态,并且具有更高的控制精度。具体的性能数据(例如位置误差、姿态误差等)需要在论文中进一步查找。
🎯 应用场景
该研究成果可应用于四旋翼飞行器在复杂环境下的目标抓取任务,例如在仓库中抓取货物、在灾难现场抓取救援物资等。此外,该方法还可以推广到其他类型的机器人控制问题,例如无人船、无人车等,具有广泛的应用前景和实际价值。未来,该方法可以进一步扩展到多机器人协同抓取等更复杂的场景。
📄 摘要(原文)
Capturing target objects using the quadrotor has gained increasing popularity in recent years, but most studies focus on capturing lightweight objects. The instantaneous contact force generated when capturing objects of a certain mass, along with the payload uncertainty after attachment, will pose significant challenges to the quadrotor control. This paper proposes a novel control architecture, namely Dual-Channel Adaptive Nonlinear Model Predictive Control (DCA-NMPC), which cascades a nonlinear model predictive control with two lower-level model reference adaptive controllers and can resist drastic impact and adapt to uncertain inertial parameters. Numerical simulation experiments are performed for validation.