Gait Transitions in Load-Pulling Quadrupeds: Insights from Sled Dogs and a Minimal SLIP Model
作者: Jiayu Ding, Benjamin Seleb, Heather J. Huson, Saad Bhamla, Zhenyu Gan
分类: eess.SY
发布日期: 2025-07-19 (更新: 2025-12-23)
💡 一句话要点
利用雪橇犬和简化SLIP模型揭示负重四足动物步态转换机制
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四足动物运动 步态转换 生物力学 弹簧负载倒立摆模型 轨迹优化
📋 核心要点
- 现有研究对负重高速运动下四足动物自适应步态转换的生物力学机制理解不足。
- 该研究通过构建四足弹簧负载倒立摆模型,并结合轨迹优化,模拟步态转换。
- 实验结果表明,摆动腿刚度调节是诱导步态转换的关键控制机制。
📝 摘要(中文)
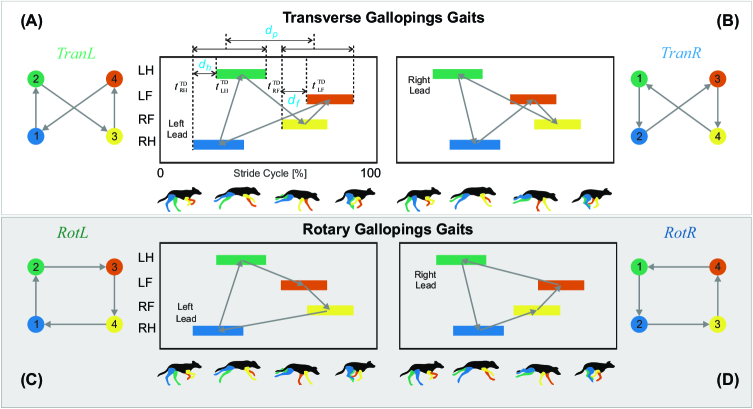
四足动物采用不同的奔跑策略来优化速度、稳定性和能量效率。然而,在高负重高速运动下,实现自适应步态转换的生物力学机制仍然知之甚少。本研究以雪橇犬为模型系统,对负重四足动物的生物力学进行了新的实证和建模研究。高速视频和力记录显示,雪橇犬经常在旋转和横向奔跑步态之间切换,且速度、步幅持续时间或地形没有任何明显变化,这为高速负重运动期间的运动多稳态提供了明确的证据。为了研究这些转换的力学基础,我们构建了一个基于物理的四足弹簧负载倒立摆模型,该模型具有混合动力学和预定的落脚序列,以重现赛跑雪橇犬中观察到的不对称奔跑模式。通过轨迹优化,我们重现了实验观察到的步态序列,并将摆动腿刚度调节确定为诱导转换的关键控制机制。这项工作为高速动物牵引提供了重要的生物力学视角,并建立了一个用于研究负重四足动物运动的建模框架,对生物学理解和自适应腿式系统的设计都具有重要意义。
🔬 方法详解
问题定义:论文旨在研究负重情况下,四足动物(特别是雪橇犬)在高速运动中步态转换的生物力学机制。现有方法难以解释动物如何在速度、步幅和地形不变的情况下,在不同步态间快速切换,缺乏对控制机制的深入理解。
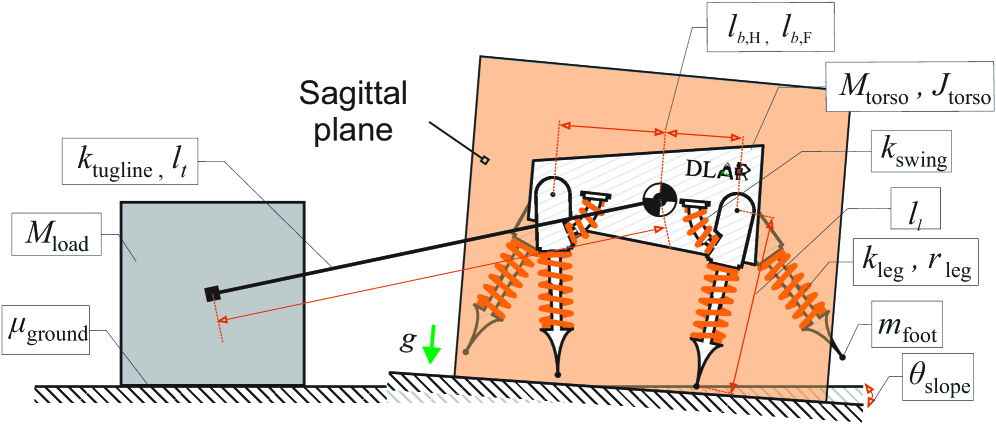
核心思路:论文的核心思路是通过建立一个简化的四足弹簧负载倒立摆(SLIP)模型,并结合实验数据,来模拟和分析雪橇犬的步态转换过程。通过轨迹优化,寻找能够重现实验观察到的步态序列的关键控制参数。
技术框架:整体框架包括以下几个主要阶段:1) 实验数据采集:使用高速视频和力传感器记录雪橇犬在负重奔跑时的运动数据。2) 模型构建:建立一个基于物理的四足SLIP模型,该模型具有混合动力学和预定的落脚序列。3) 轨迹优化:使用优化算法,寻找能够重现实验观察到的步态序列的模型参数。4) 结果分析:分析优化后的模型参数,识别影响步态转换的关键控制机制。
关键创新:该研究的关键创新在于将实验数据与简化的物理模型相结合,揭示了摆动腿刚度调节在步态转换中的重要作用。与以往的研究相比,该研究更注重对控制机制的量化分析,并提供了一个可用于研究负重四足动物运动的建模框架。
关键设计:模型采用弹簧负载倒立摆(SLIP)模型来简化腿部动力学。关键参数包括腿部刚度(特别是摆动腿刚度)、腿部长度和落脚点位置。轨迹优化采用合适的优化算法(具体算法未知),目标函数旨在最小化模型预测与实验数据之间的差异。预定的落脚序列用于模拟雪橇犬的不对称奔跑模式。
🖼️ 关键图片

📊 实验亮点
研究通过实验观察发现,雪橇犬在高速负重运动中,能够在旋转和横向奔跑步态之间快速切换,且速度、步幅持续时间或地形没有明显变化。通过模型分析,研究确定摆动腿刚度调节是诱导步态转换的关键控制机制。该模型能够重现实验观察到的步态序列,验证了模型的有效性。
🎯 应用场景
该研究成果可应用于机器人领域,为设计具有自适应步态的四足机器人提供理论指导。例如,可以开发能够根据负载和地形变化自动调整步态的负重机器人,用于物流、搜救等场景。此外,该研究也有助于深入理解动物运动的生物力学原理,为动物康复和运动训练提供参考。
📄 摘要(原文)
Quadrupedal animals employ diverse galloping strategies to optimize speed, stability, and energy efficiency. However, the biomechanical mechanisms that enable adaptive gait transitions during high-speed locomotion under load remain poorly understood. In this study, we present new empirical and modeling insights into the biomechanics of load-pulling quadrupeds, using sprint sled dogs as a model system. High-speed video and force recordings reveal that sled dogs often switch between rotary and transverse galloping gaits within just a few strides and without any observable changes in speed, stride duration, or terrain, providing clear evidence of locomotor multistability during high-speed load-pulling. To investigate the mechanical basis of these transitions, a physics-based quadrupedal Spring-Loaded Inverted Pendulum model with hybrid dynamics and prescribed footfall sequences to reproduce the asymmetric galloping patterns observed in racing sled dogs. Through trajectory optimization, we replicate experimentally observed gait sequences and identify swing-leg stiffness modulation as a key control mechanism for inducing transitions. This work provides a much-needed biomechanical perspective on high-speed animal draft and establishes a modeling framework for studying locomotion in pulling quadrupeds, with implications for both biological understanding and the design of adaptive legged systems.