Data-driven control of a magnetohydrodynamic flow
作者: Adam Uchytil, Milan Korda, Jiří Zemánek
分类: physics.flu-dyn, eess.SY
发布日期: 2025-07-10 (更新: 2025-08-07)
备注: 21 pages, 7 figures; name changed, added references, polished language, expanded appendix
💡 一句话要点
提出基于Koopman算子的模型预测控制方法,实现磁流体动力学流动的实时反馈控制
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 磁流体动力学 模型预测控制 Koopman算子 数据驱动控制 实时控制
📋 核心要点
- 传统流体控制方法难以应对非线性磁流体动力学系统,需要更高效的控制策略。
- 利用Koopman算子将非线性流体动力学线性化,构建数据驱动的预测模型,简化模型预测控制。
- 实验验证了该方法在实时控制磁流体流动以匹配目标速度场和涡度场方面的有效性。
📝 摘要(中文)
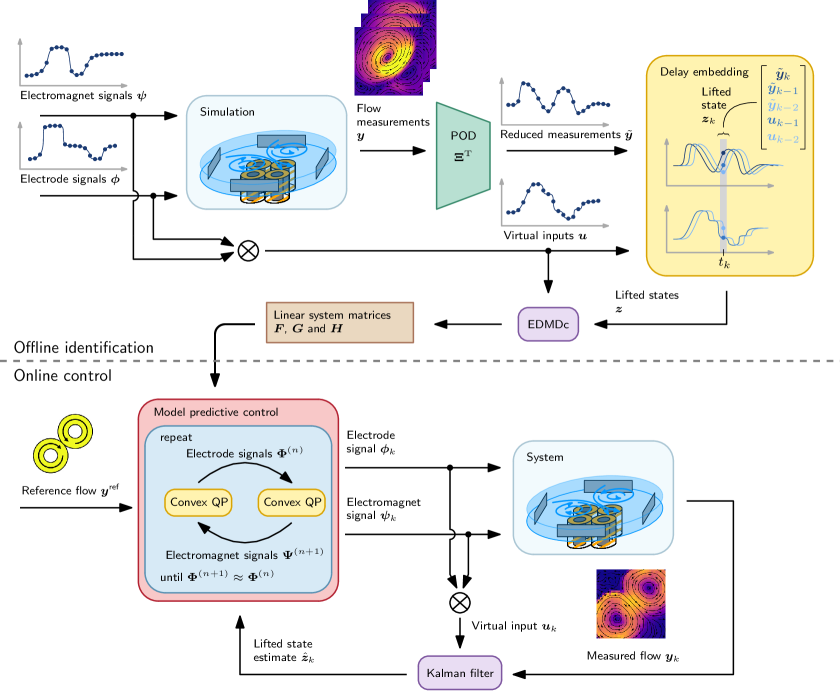
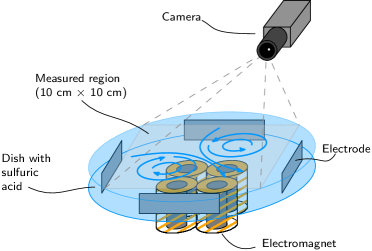
本文展示了一种弱导电磁流体动力学(MHD)流动的反馈控制方法,该方法通过外部施加的电场和磁场产生的洛伦兹力来实现。具体而言,我们利用位于流体储罐周围和下方的电极和电磁铁阵列来引导电解液的流动,使其达到预定的速度或涡度模式,并通过平面粒子图像测速(PIV)提供反馈。控制采用模型预测控制(MPC)框架实现,其中控制信号通过最小化流动预测演化过程中的成本函数来计算。预测器完全由数据构建,使用Koopman算子理论,该理论能够线性表示底层非线性流体动力学。这种线性特性使得MPC问题可以通过在两个小的、可有效求解的凸二次规划(QP)之间交替来解决:一个用于电极,一个用于电磁铁。由此产生的控制器在标准笔记本电脑上以闭环方式运行,从而实现对流动的实时控制。我们通过实验证明了该方法的功能,在实验中,流动被塑造成与一系列参考速度场和时变涡度场相匹配。
🔬 方法详解
问题定义:论文旨在解决弱导电磁流体动力学(MHD)流动的精确控制问题。现有方法通常依赖于复杂的物理模型或计算成本高昂的数值模拟,难以实现实时反馈控制。此外,MHD流动具有高度非线性,传统的线性控制方法难以有效处理。
核心思路:论文的核心思路是利用Koopman算子理论,将非线性MHD流动动力学近似为线性系统。通过数据驱动的方式学习Koopman算子,构建线性预测模型。然后,基于该线性模型设计模型预测控制器(MPC),实现对MHD流动的实时反馈控制。
技术框架:整体框架包括以下几个主要模块:1) 实验装置:包含流体储罐、电极和电磁铁阵列、粒子图像测速(PIV)系统;2) 数据采集:利用PIV系统测量流场速度,作为训练数据;3) Koopman算子学习:利用采集的数据学习Koopman算子,构建线性预测模型;4) 模型预测控制(MPC):基于线性预测模型,设计MPC控制器,计算最优的电极和电磁铁控制信号;5) 实时控制:将计算得到的控制信号施加到电极和电磁铁上,实现对流动的实时控制。
关键创新:最重要的技术创新点在于利用Koopman算子理论将非线性MHD流动动力学线性化。与传统的基于物理模型的控制方法相比,该方法完全基于数据驱动,避免了复杂的模型推导和参数辨识过程。与传统的非线性控制方法相比,该方法将非线性控制问题转化为线性控制问题,大大降低了计算复杂度,从而实现了实时控制。
关键设计:MPC问题被分解为两个小的凸二次规划(QP)问题,分别对应于电极和电磁铁的控制。这种分解大大降低了计算复杂度,使得控制器可以在标准笔记本电脑上实时运行。成本函数的设计需要平衡控制精度和控制能量消耗。Koopman算子的学习需要选择合适的基函数和正则化参数,以保证模型的预测精度和泛化能力。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该方法能够有效地控制MHD流动,使其与参考速度场和时变涡度场相匹配。控制器在标准笔记本电脑上以闭环方式运行,实现了实时控制。具体而言,该方法能够将流动塑造成各种复杂的形状,例如圆形、方形等,并且能够跟踪时变的涡度场。虽然论文中没有给出具体的性能数据,但实验结果表明该方法具有良好的控制精度和鲁棒性。
🎯 应用场景
该研究成果可应用于微流控芯片设计、生物医学工程、材料科学等领域。例如,可以利用该方法精确控制微流体混合、分离和输运,实现药物递送、细胞分选等功能。此外,该方法还可以应用于金属冶炼、等离子体控制等工业领域,提高生产效率和产品质量。未来,该方法有望推广到更复杂的流体控制系统,实现更高级的控制功能。
📄 摘要(原文)
We demonstrate the feedback control of a weakly conducting magnetohydrodynamic (MHD) flow via Lorentz forces generated by externally applied electric and magnetic fields. Specifically, we steer the flow of an electrolyte toward prescribed velocity or vorticity patterns using arrays of electrodes and electromagnets positioned around and beneath a fluid reservoir, with feedback provided by planar particle image velocimetry (PIV). Control is implemented using a model predictive control (MPC) framework, in which control signals are computed by minimizing a cost function over the predicted evolution of the flow. The predictor is constructed entirely from data using Koopman operator theory, which enables a linear representation of the underlying nonlinear fluid dynamics. This linearity allows the MPC problem to be solved by alternating between two small and efficiently solvable convex quadratic programs (QPs): one for the electrodes and one for the electromagnets. The resulting controller runs in a closed loop on a standard laptop, enabling real-time control of the flow. We demonstrate the functionality of the approach through experiments in which the flow is shaped to match a range of reference velocity fields and a time-varying vorticity field.