Force-IMU Fusion-Based Sensing Acupuncture Needle and Quantitative Analysis System for Acupuncture Manipulations
作者: Peng Tian, Kang Yu, Tianyun Jiang, Yuqi Wang, Haiying Zhang, Hao Yang, Yunfeng Wang, Jun Zhang, Shuo Gao, Junhong Gao
分类: eess.SY
发布日期: 2025-07-07
备注: This work has been submitted to the IEEE for possible publication
💡 一句话要点
提出基于力-IMU融合的传感针灸针系统,用于针灸操作的定量分析
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 针灸 传感针灸针 力-IMU融合 定量分析 运动学建模
📋 核心要点
- 现有针灸研究缺乏对操作参数的定量机械检测,难以实现针灸技术的标准化。
- 该研究提出了一种基于力传感器、IMU和视觉融合的传感针灸针系统,用于精确测量针灸操作的关键参数。
- 实验结果表明,该系统能够高精度地检测针灸操作的力、速度和位移等参数,为针灸标准化研究提供工具。
📝 摘要(中文)
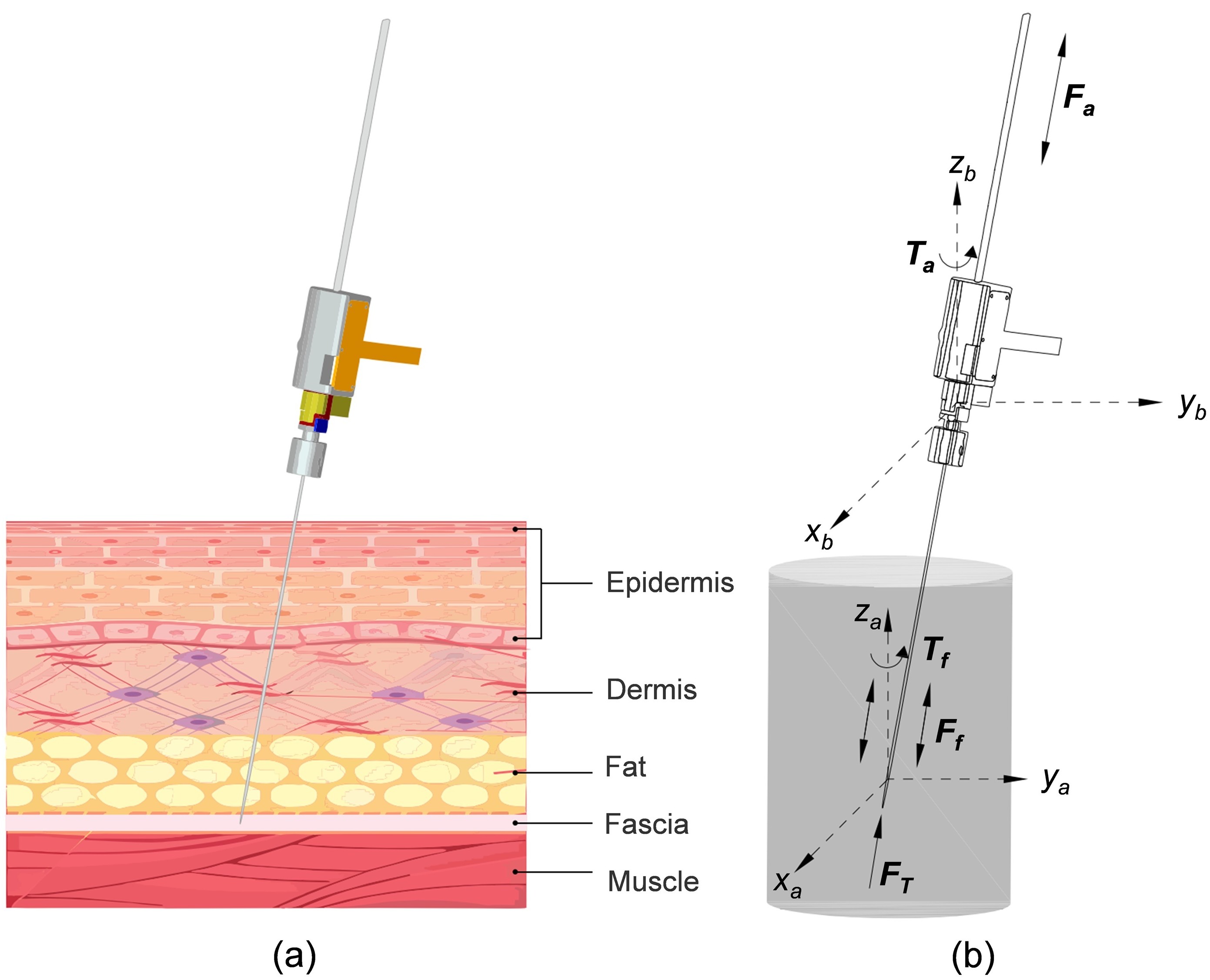
针灸是传统中医学的关键治疗方法之一,已广泛应用于临床。针灸操作参数的定量研究对于实现技术标准化至关重要。然而,针灸参数的定量机械检测仍然有限。本研究建立了针灸的运动学和动力学模型,确定了关键参数,如提插力、加速度、速度、位移,以及捻转角速度和角度。为了测量这些关键参数,我们提出了一个定量系统,包括配备力传感器和惯性测量单元(IMU)的传感针灸针,以及用于捕获图像信息的外部摄像头模块。通过融合视觉和IMU数据,我们准确地识别针的静止或运动状态,从而能够分段计算提插速度和位移。实验结果表明,该传感针灸针实现了高精度的全面检测,力测量的非线性误差为0.45%,位移的RMSE为1.2 mm。提取的参数为四种基本针灸操作的运行特性和运动模式提供了客观描述。这些发现为针灸标准化研究提供了有价值的工具和方法。
🔬 方法详解
问题定义:传统针灸操作的标准化面临挑战,因为缺乏对针灸操作中关键力学参数的精确量化手段。现有方法难以准确测量提插力、捻转角度等参数,影响了针灸技术的客观评估和传承。因此,需要一种能够精确测量针灸操作参数的系统,以促进针灸技术的标准化。
核心思路:本研究的核心思路是结合力传感器、IMU和视觉信息,构建一个多模态融合的传感系统。力传感器用于直接测量提插力,IMU用于测量加速度和角速度,摄像头用于辅助判断针的状态和运动轨迹。通过数据融合,可以更准确地估计针灸操作的关键参数。
技术框架:该系统的整体架构包括三个主要模块:1) 传感针灸针,集成了力传感器和IMU;2) 外部摄像头模块,用于捕获针的视觉信息;3) 数据融合与处理模块,用于融合力、IMU和视觉数据,计算针灸操作参数。数据处理流程包括:数据采集、数据预处理、状态识别(静止/运动)、参数计算和结果输出。
关键创新:该研究的关键创新在于多模态数据融合策略。通过融合力传感器、IMU和视觉信息,可以克服单一传感器的局限性,提高参数测量的精度和鲁棒性。例如,视觉信息可以辅助判断针的状态,从而更准确地计算提插速度和位移。此外,该研究还建立了针灸操作的运动学和动力学模型,为参数计算提供了理论基础。
关键设计:力传感器选用高精度微型力传感器,IMU选用低噪声、高采样率的惯性测量单元。视觉模块采用高分辨率摄像头,并使用图像处理算法提取针的特征点。数据融合采用卡尔曼滤波等方法,对力、IMU和视觉数据进行最优估计。状态识别采用基于阈值的算法,根据加速度和角速度的变化判断针的静止或运动状态。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该传感针灸针系统能够高精度地检测针灸操作的关键参数。力测量的非线性误差仅为0.45%,位移的RMSE为1.2 mm。这些结果表明,该系统具有良好的测量精度和可靠性,能够为针灸标准化研究提供有价值的数据支持。此外,该系统能够客观描述四种基本针灸操作的运行特性和运动模式,为针灸技术的传承和发展提供参考。
🎯 应用场景
该研究成果可应用于针灸临床实践、教学和科研。在临床实践中,医生可以使用该系统实时监测针灸操作参数,提高治疗效果。在教学中,该系统可以帮助学生更直观地理解针灸操作的要领。在科研中,该系统可以用于研究不同针灸操作对人体的影响,为针灸理论提供实验依据。未来,该技术有望推广到其他中医诊疗领域,促进中医的现代化和标准化。
📄 摘要(原文)
Acupuncture, one of the key therapeutic methods in Traditional Chinese Medicine (TCM), has been widely adopted in various clinical fields. Quantitative research on acupuncture manipulation parameters is critical to achieve standardized techniques. However, quantitative mechanical detection of acupuncture parameters remains limited. This study establishes a kinematic and dynamic model of acupuncture, identifying key parameters such as lifting-thrusting force, acceleration, velocity, displacement, as well as twirling-rotating angular velocity and angle. To measure these critical parameters, we propose a quantitative system comprising a sensing needle equipped with a force sensor and an inertial measurement unit (IMU), as well as an external camera module to capture image information. By fusing visual and IMU data, we accurately identify the stationary or motion states of the needle, enabling segmented computation of lifting-thrusting velocity and displacement. The experimental results demonstrate that the sensing needle achieves comprehensive detection with high precision, featuring a nonlinearity error of 0.45% in force measurement and an RMSE of 1.2 mm in displacement. The extracted parameters provide an objective description of the operational characteristics and motion patterns of the four basic acupuncture manipulations. These findings provide valuable tools and methods for research in acupuncture standardization.