Quantification of Sim2Real Gap via Neural Simulation Gap Function
作者: P Sangeerth, Pushpak Jagtap
分类: eess.SY, cs.RO
发布日期: 2025-06-21
💡 一句话要点
提出神经仿真差距函数,量化模型与高保真仿真器之间的差异
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 仿真差距 神经仿真 Real-to-Sim 模型预测控制 机器人控制
📋 核心要点
- 现有方法设计的控制器在真实环境中表现不佳,主要原因是数学模型与真实系统之间存在未建模的差距。
- 论文提出神经仿真差距函数,利用神经网络学习并量化数学模型与高保真仿真器之间的差异。
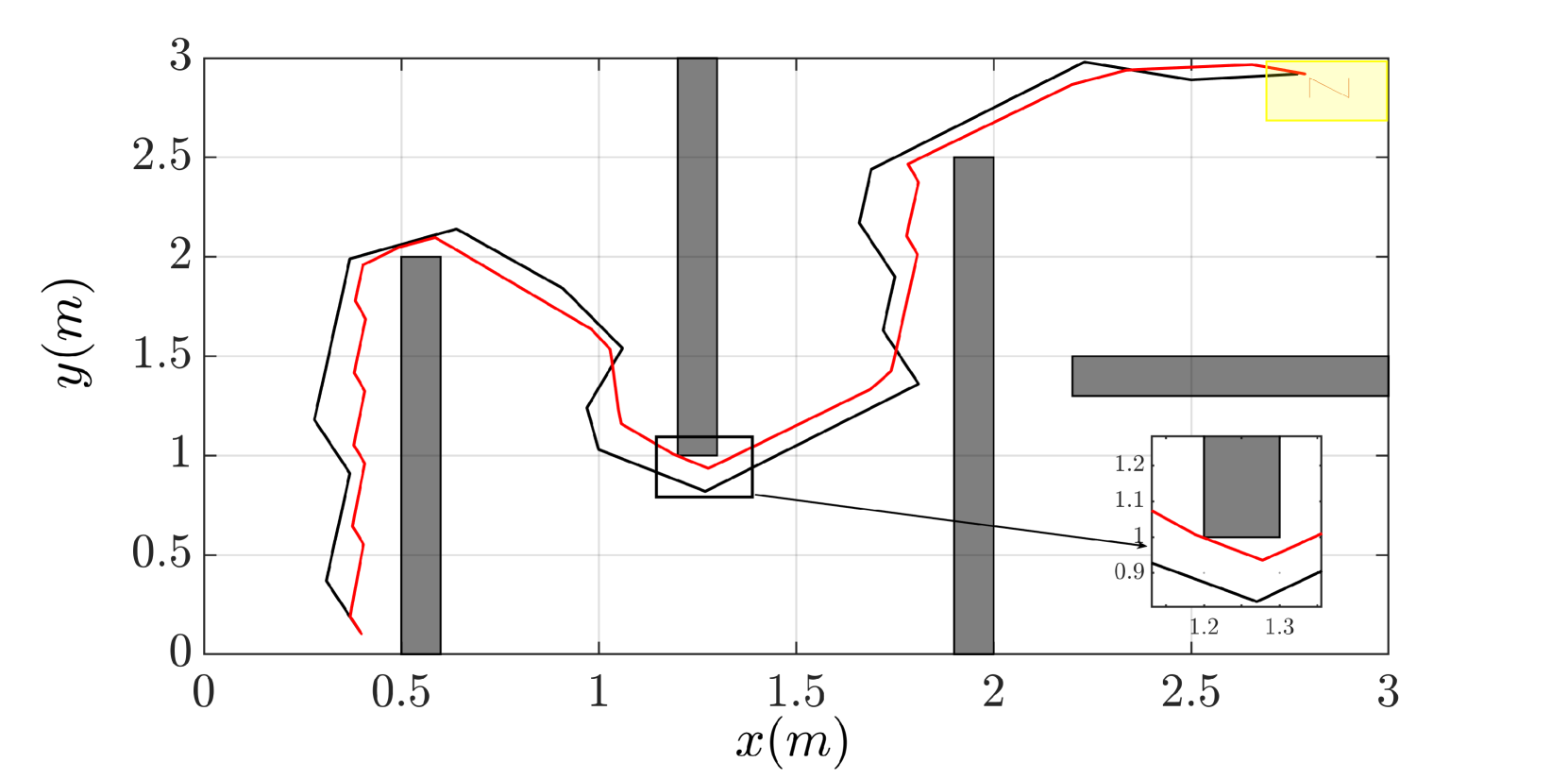
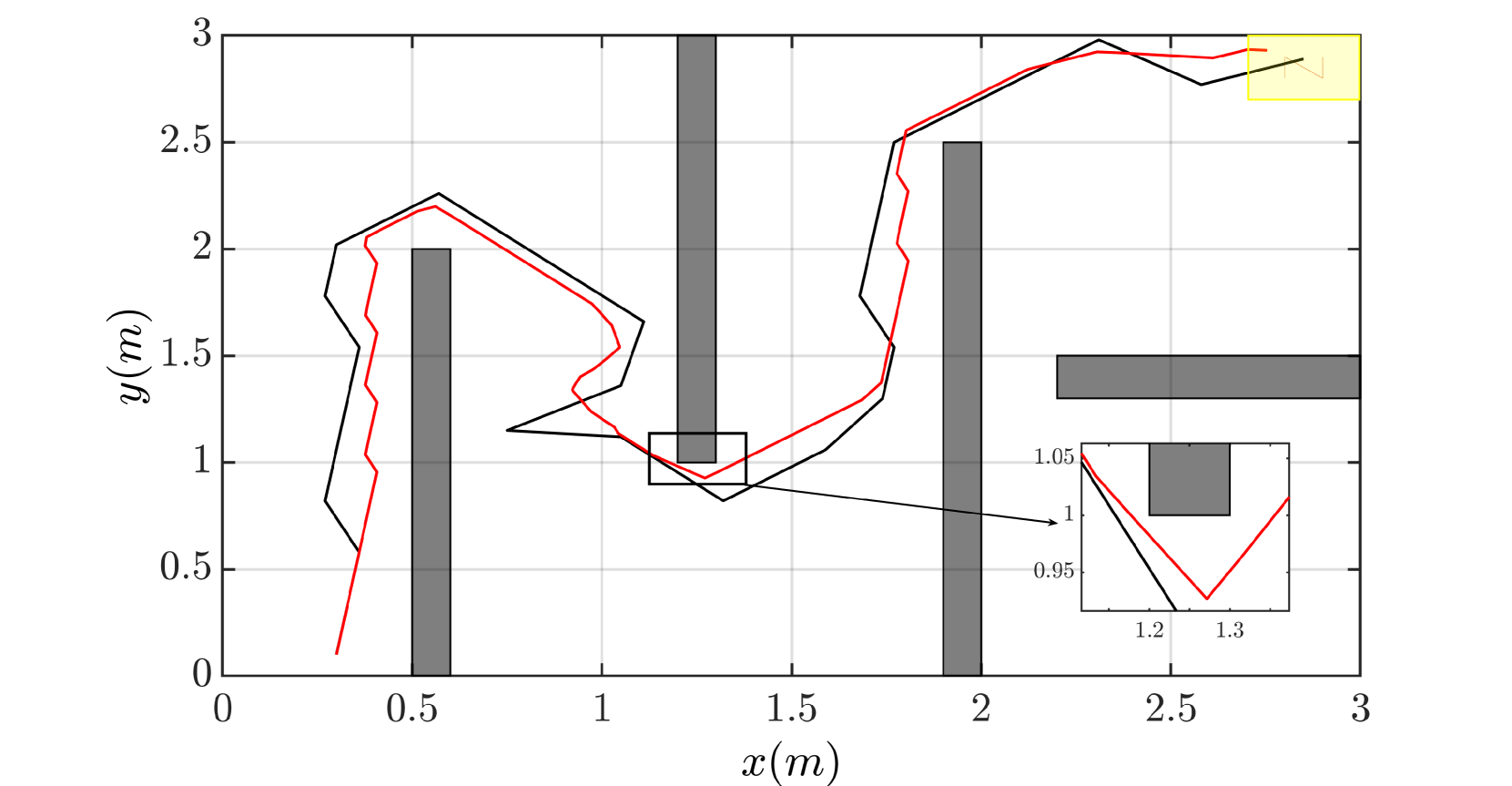
- 通过Mecanum机器人和摆锤两个案例研究,验证了该方法在仿真到真实世界过渡中的有效性。
📝 摘要(中文)
本文提出了一种神经仿真差距函数,用于量化数学模型与高保真仿真器(更接近真实环境)之间的差距。通常,为数学模型设计的控制器在现实中表现不佳,这是由于两个系统之间存在未建模的差距。借助该仿真差距函数,可以使用现有的基于模型的方法为数学系统设计控制器,并正式保证从仿真到真实世界的良好过渡。虽然本文使用神经网络量化了这种差距,该网络使用有限数量的数据点进行训练,但我们为包括未见数据点在内的整个状态空间提供了仿真差距函数的正式保证。我们利用Real-to-Sim迁移的最新进展,从高保真仿真器收集数据,以确保与现实紧密对齐。我们通过两个案例研究——Mecanum机器人和摆锤,展示了我们的结果。
🔬 方法详解
问题定义:论文旨在解决数学模型与高保真仿真器(代表现实)之间存在的差距量化问题。现有方法设计的控制器通常在数学模型上表现良好,但由于未建模的动态和环境因素,在真实世界中性能下降。这种差距使得从仿真到真实的迁移变得困难,阻碍了基于模型的控制算法在实际机器人系统中的应用。
核心思路:论文的核心思路是利用神经网络学习一个“仿真差距函数”,该函数能够量化数学模型预测与高保真仿真器输出之间的差异。通过学习这个差距函数,可以修正数学模型的预测,使其更接近真实系统的行为,从而提高控制器在真实环境中的性能。
技术框架:整体框架包括以下几个步骤:1) 使用高保真仿真器生成数据,模拟真实环境中的系统行为。2) 使用这些数据训练一个神经网络,使其能够预测数学模型与仿真器之间的差距。3) 利用训练好的神经网络作为仿真差距函数,修正数学模型的预测。4) 基于修正后的数学模型设计控制器,并将其部署到真实系统中。
关键创新:论文的关键创新在于提出了“神经仿真差距函数”的概念,并使用神经网络对其进行建模。与传统的基于物理的建模方法相比,神经网络能够更好地捕捉复杂的、未知的系统动态。此外,论文还提供了关于仿真差距函数在整个状态空间上的正式保证,即使对于未见的数据点也有效。
关键设计:论文使用Real-to-Sim迁移技术,确保高保真仿真器与真实环境尽可能接近。神经网络的结构和损失函数的设计需要根据具体的应用场景进行调整。关键在于选择合适的网络结构,使其能够有效地学习仿真差距函数。此外,损失函数的设计也需要考虑模型的预测精度和泛化能力。
🖼️ 关键图片
📊 实验亮点
论文通过Mecanum机器人和摆锤两个案例研究验证了所提出方法的有效性。实验结果表明,使用神经仿真差距函数修正后的数学模型能够更准确地预测真实系统的行为,从而提高了控制器的性能。虽然论文中没有给出具体的性能数据和提升幅度,但强调了该方法在仿真到真实世界过渡中的作用。
🎯 应用场景
该研究成果可广泛应用于机器人、自动驾驶等领域,尤其是在需要从仿真环境迁移到真实环境的应用中。通过量化仿真与现实之间的差距,可以提高控制算法的鲁棒性和泛化能力,降低开发成本和风险。未来,该方法可以扩展到更复杂的系统和环境,例如多智能体系统和动态环境。
📄 摘要(原文)
In this paper, we introduce the notion of neural simulation gap functions, which formally quantifies the gap between the mathematical model and the model in the high-fidelity simulator, which closely resembles reality. Many times, a controller designed for a mathematical model does not work in reality because of the unmodelled gap between the two systems. With the help of this simulation gap function, one can use existing model-based tools to design controllers for the mathematical system and formally guarantee a decent transition from the simulation to the real world. Although in this work, we have quantified this gap using a neural network, which is trained using a finite number of data points, we give formal guarantees on the simulation gap function for the entire state space including the unseen data points. We collect data from high-fidelity simulators leveraging recent advancements in Real-to-Sim transfer to ensure close alignment with reality. We demonstrate our results through two case studies - a Mecanum bot and a Pendulum.