Approximation-free Control for Signal Temporal Logic Specifications using Spatiotemporal Tubes
作者: Ratnangshu Das, Subhodeep Choudhury, Pushpak Jagtap
分类: eess.SY
发布日期: 2025-05-08 (更新: 2025-12-04)
备注: This paper is a revised version of the article published in IEEE Control Systems Letters (L-CSS). This version corrects the errors in Theorem 3.2 and the proof of Theorem 3.3, that was present in the initial submitted manuscript
期刊: IEEE Control Systems Letters, vol. 9, pp. 1562-1567, 2025
DOI: 10.1109/LCSYS.2025.3579761
💡 一句话要点
提出基于时空管的无近似控制方法,解决未知控制仿射系统中的STL规范问题
🎯 匹配领域: 支柱八:物理动画 (Physics-based Animation)
关键词: 信号时序逻辑 时空管 鲁棒控制 无模型控制 场景优化
📋 核心要点
- 现有方法在处理未知控制仿射系统的STL规范时,往往需要对系统动力学进行近似,导致控制性能下降或安全性无法保证。
- 该论文提出一种基于时空管(STT)的控制框架,将STL约束转化为鲁棒优化问题,并通过场景优化程序构建具有形式化保证的STT。
- 实验结果表明,该方法在计算效率、轨迹质量和处理复杂STL任务方面优于现有方法,验证了其有效性和优越性。
📝 摘要(中文)
本文提出了一种基于时空管(STT)的控制框架,用于满足未知控制仿射系统中的信号时序逻辑(STL)规范。我们将STL约束表示为一个鲁棒优化问题(ROP),并将其重构为一个场景优化程序(SOP),以构建具有形式正确性保证的STT。此外,我们还提出了一种闭环控制律,该控制律独立于系统动力学运行,并确保系统轨迹在STT内演化,从而满足STL规范。通过案例研究以及与最先进方法的比较,验证了所提出方法的有效性,证明了其在计算效率、轨迹质量以及对复杂STL任务的适用性方面的优越性。
🔬 方法详解
问题定义:论文旨在解决未知控制仿射系统中,如何设计控制器以满足给定的信号时序逻辑(STL)规范的问题。现有方法通常需要对系统动力学进行近似,这可能导致控制性能下降,甚至无法保证系统的安全性。此外,复杂STL规范的求解通常计算量巨大,难以应用于实时控制。
核心思路:论文的核心思路是将STL规范转化为一个鲁棒优化问题(ROP),然后通过场景优化程序(SOP)来构建时空管(STT)。STT本质上定义了一个安全区域,只要系统轨迹保持在STT内,就能保证满足STL规范。关键在于,论文提出了一种闭环控制律,该控制律不依赖于系统动力学,而是直接驱动系统轨迹进入并保持在STT内。这样就避免了对系统动力学的近似,提高了控制的鲁棒性。
技术框架:整体框架包含以下几个主要步骤:1) 将STL规范转化为鲁棒优化问题(ROP);2) 使用场景优化程序(SOP)求解ROP,得到时空管(STT);3) 设计闭环控制律,该控制律驱动系统轨迹进入并保持在STT内。整个过程无需对系统动力学进行精确建模。
关键创新:最重要的创新点在于提出了一个与系统动力学无关的闭环控制律。传统的基于模型预测控制(MPC)的方法需要精确的系统模型,而该方法通过STT将STL规范转化为几何约束,然后设计控制律保证轨迹在约束内,从而避免了对系统模型的依赖。这种方法提高了控制的鲁棒性和适用性。
关键设计:关键设计包括:1) 如何将复杂的STL规范有效地转化为鲁棒优化问题;2) 如何选择合适的场景优化程序来求解ROP,以保证计算效率;3) 如何设计闭环控制律,使其能够有效地驱动系统轨迹进入并保持在STT内,同时保证控制的平滑性。论文中具体控制律的设计细节未知。
🖼️ 关键图片
📊 实验亮点
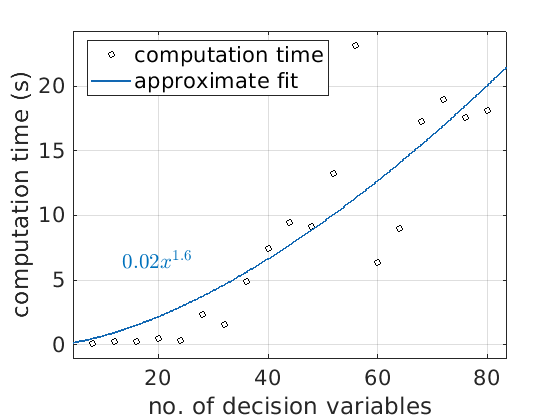
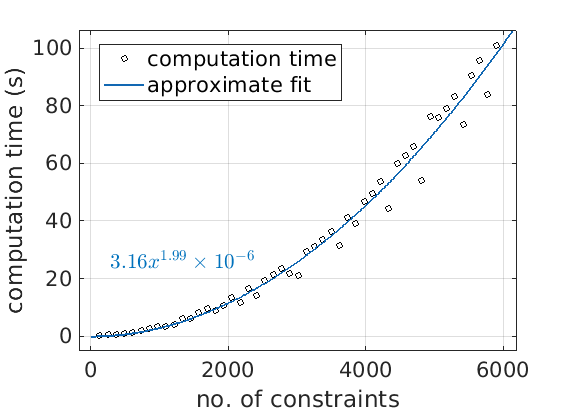
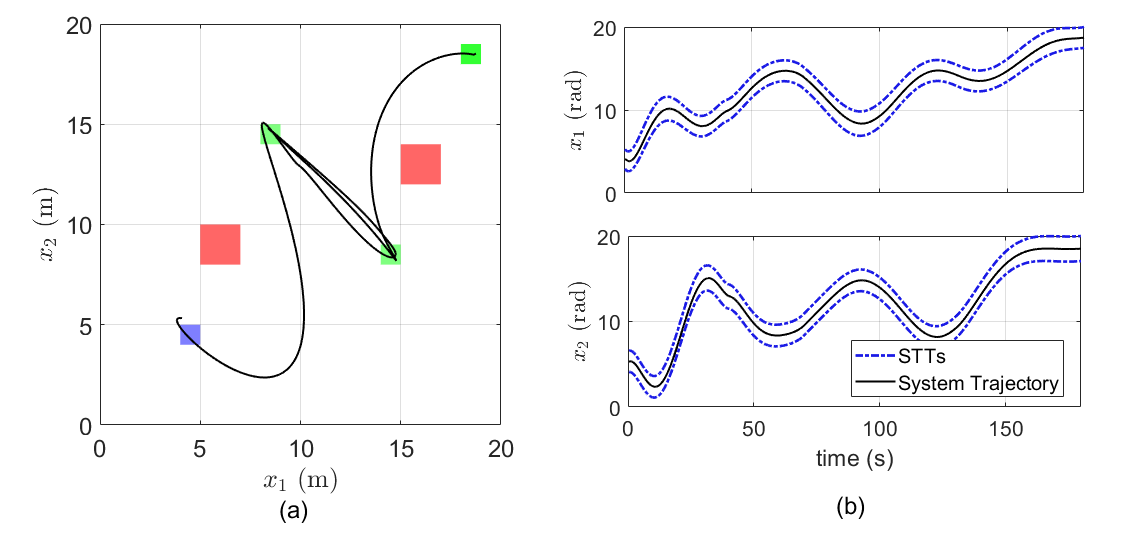
论文通过案例研究验证了所提出方法的有效性。与现有方法相比,该方法在计算效率方面表现出显著优势,能够更快地生成控制策略。此外,该方法生成的轨迹质量更高,能够更好地满足STL规范。实验结果表明,该方法能够成功应用于复杂的STL任务,例如避障和区域访问等。
🎯 应用场景
该研究成果可应用于各种需要满足复杂时序逻辑规范的控制系统,例如自动驾驶、机器人导航、无人机集群控制、以及工业自动化等领域。通过使用该方法,可以保证系统在复杂环境下的安全性和可靠性,并提高系统的自主性和适应性。该方法尤其适用于系统动力学模型不精确或难以获取的场景。
📄 摘要(原文)
This paper presents a spatiotemporal tube (STT)-based control framework for satisfying Signal Temporal Logic (STL) specifications in unknown control-affine systems. We formulate STL constraints as a robust optimization problem (ROP) and recast it as a scenario optimization program (SOP) to construct STTs with formal correctness guarantees. We also propose a closed-form control law that operates independently of the system dynamics, and ensures the system trajectory evolves within the STTs, thereby satisfying the STL specifications. The proposed approach is validated through case studies and comparisons with state-of-the-art methods, demonstrating superior computational efficiency, trajectory quality, and applicability to complex STL tasks.