Integrated Sensing, Computing, Communication, and Control for Time-Sequence-Based Semantic Communications
作者: Qingliang Li, Bo Chang, Weidong Mei, Zhi Chen
分类: eess.SY, cs.IT
发布日期: 2025-05-06
备注: This version of the manuscript was submitted to IEEE Transactions on Communications for possible publication
💡 一句话要点
针对时序语义通信,提出集成感知、计算、通信与控制的机器人自适应控制方法
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 语义通信 无线控制系统 时间序列 深度强化学习 工业物联网
📋 核心要点
- 现有无线控制系统难以在时序数据中提取语义相关性,导致通信开销大,无法满足低延迟需求。
- 论文提出ISC3架构,通过语义特征提取和重构,避免传输高度相关信息,降低通信开销。
- 实验结果表明,该方法优于其他基线方案,验证了其在实际应用中的有效性。
📝 摘要(中文)
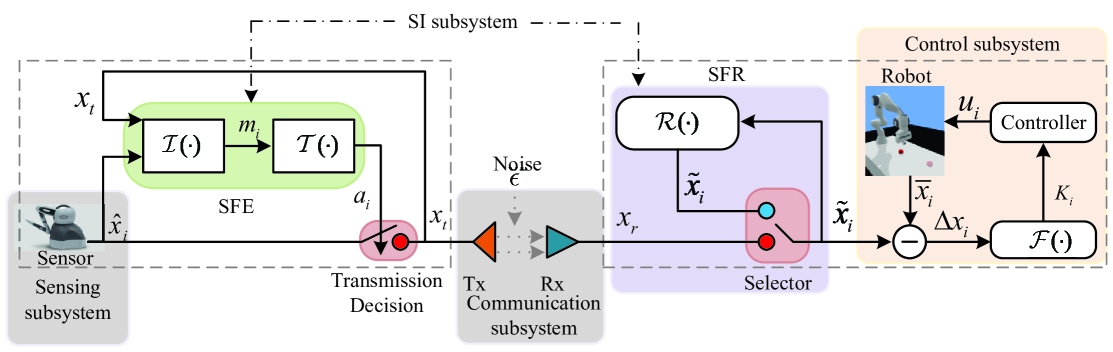
在即将到来的工业物联网(IIoT)时代,大量面向任务的应用将依赖于实时无线控制系统(WCS)。对于这些系统,超可靠和低延迟的无线通信对于确保控制信息的及时传输至关重要。为了实现这一目标,我们提出了一种新颖的基于时间序列的语义通信范例,其中开发了一种集成的感知、计算、通信和控制(ISC3)架构,以对时间序列上的控制信息进行合理的语义推理(SI),从而实现对机器人的自适应控制。然而,由于时间序列中的因果相关性,控制信息不呈现马尔可夫性质。为了解决这个挑战,我们计算发射机(Tx)在不同时间感知到的控制信息的互信息,并通过语义特征提取器(SFE)模块识别它们的时间语义相关性。通过这种方式,可以避免高度相关的信息传输,从而大大减少通信开销。同时,在接收机(Rx)采用语义特征重构器(SFR)模块,以便在Tx未激活信息传输时,根据先前接收到的信息重建控制信息。此外,Rx还采用控制增益策略,以基于一些实际方面(例如从Tx到Rx的信息传输质量)自适应地调整受控目标的控制增益。我们设计了上述模块/策略的神经网络结构,并通过一种新颖的混合奖励多智能体深度强化学习框架训练它们的参数。进行了现场实验以评估我们提出的方法在实践中的性能,结果表明,与其他基线方案相比,该方法具有显著的优势。
🔬 方法详解
问题定义:论文旨在解决实时无线控制系统中,由于控制信息的时间序列相关性,导致传统通信方法传输冗余信息,无法满足超可靠低延迟通信(URLLC)需求的问题。现有方法通常忽略控制信息的时间依赖性,导致通信开销大,难以适应动态变化的工业环境。
核心思路:论文的核心思路是利用语义通信,提取控制信息在时间序列上的语义相关性,避免传输冗余信息,从而降低通信开销,提高通信效率。通过在发射端进行语义特征提取,并在接收端进行语义特征重构,可以在保证控制性能的前提下,显著减少需要传输的数据量。
技术框架:整体架构包含四个主要模块:集成感知、计算、通信和控制(ISC3)。发射端包含语义特征提取器(SFE),用于提取控制信息的时间语义相关性。接收端包含语义特征重构器(SFR),用于根据先前接收到的信息重建控制信息。此外,接收端还包含控制增益策略模块,用于根据信道质量等因素自适应调整控制增益。整个系统通过无线信道连接,实现控制信息的实时传输。
关键创新:论文的关键创新在于将语义通信应用于无线控制系统,并提出了一种基于时间序列的语义通信范例。通过语义特征提取和重构,可以有效利用控制信息的时间相关性,减少冗余信息的传输。此外,论文还提出了一种混合奖励多智能体深度强化学习框架,用于训练各个模块的参数,实现系统的优化。
关键设计:SFE和SFR模块采用神经网络结构,具体网络结构未知。论文使用互信息来衡量控制信息在不同时间的相关性,并以此为基础设计了语义特征提取算法。控制增益策略根据信道质量、信息传输质量等因素自适应调整控制增益,具体调整策略未知。论文使用混合奖励多智能体深度强化学习框架训练网络参数,奖励函数的设计未知。
🖼️ 关键图片


📊 实验亮点
论文通过现场实验验证了所提出方法的有效性。实验结果表明,该方法能够显著降低通信开销,提高控制系统的性能。具体性能数据和提升幅度未知,但论文强调了该方法相对于其他基线方案的显著优势。
🎯 应用场景
该研究成果可应用于工业物联网、机器人控制、智能制造等领域。通过降低无线通信的延迟和提高可靠性,可以实现更精确、更高效的远程控制和自动化生产,提升工业生产效率和智能化水平。未来,该方法有望推广到其他需要实时控制的场景,如自动驾驶、远程医疗等。
📄 摘要(原文)
In the upcoming industrial internet of things (IIoT) era, a surge of task-oriented applications will rely on real-time wireless control systems (WCSs). For these systems, ultra-reliable and low-latency wireless communication will be crucial to ensure the timely transmission of control information. To achieve this purpose, we propose a novel time-sequence-based semantic communication paradigm, where an integrated sensing, computing, communication, and control (ISC3) architecture is developed to make sensible semantic inference (SI) for the control information over time sequences, enabling adaptive control of the robot. However, due to the causal correlations in the time sequence, the control information does not present the Markov property. To address this challenge, we compute the mutual information of the control information sensed at the transmitter (Tx) over different time and identify their temporal semantic correlation via a semantic feature extractor (SFE) module. By this means, highly correlated information transmission can be avoided, thus greatly reducing the communication overhead. Meanwhile, a semantic feature reconstructor (SFR) module is employed at the receiver (Rx) to reconstruct the control information based on the previously received one if the information transmission is not activated at the Tx. Furthermore, a control gain policy is also employed at the Rx to adaptively adjust the control gain for the controlled target based on several practical aspects such as the quality of the information transmission from the Tx to the Rx. We design the neural network structures of the above modules/policies and train their parameters by a novel hybrid reward multi-agent deep reinforcement learning framework. On-site experiments are conducted to evaluate the performance of our proposed method in practice, which shows significant gains over other baseline schemes.