Mixed Bernstein-Fourier Approximants for Optimal Trajectory Generation with Periodic Behavior
作者: Liraz Mudrik, Sean Kragelund, Isaac Kaminer
分类: eess.SY
发布日期: 2025-04-24 (更新: 2026-01-15)
备注: 51 pages, 10 figures
💡 一句话要点
提出混合Bernstein-Fourier逼近方法,用于解决周期性行为下的最优轨迹生成问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 最优轨迹生成 周期性行为 Bernstein多项式 傅里叶级数 最优控制 自主系统 运动规划
📋 核心要点
- 现有数值方法难以有效处理周期性行为,尤其是在需要等距时间采样的自主系统中。
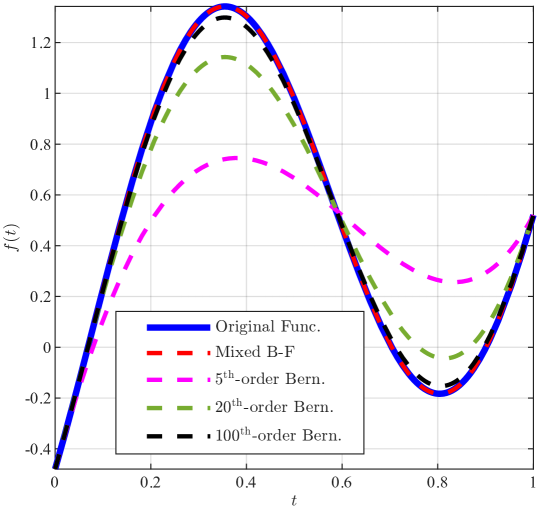
- 提出混合Bernstein-Fourier逼近框架,利用Bernstein多项式和傅里叶级数分别处理非周期性和周期性动态。
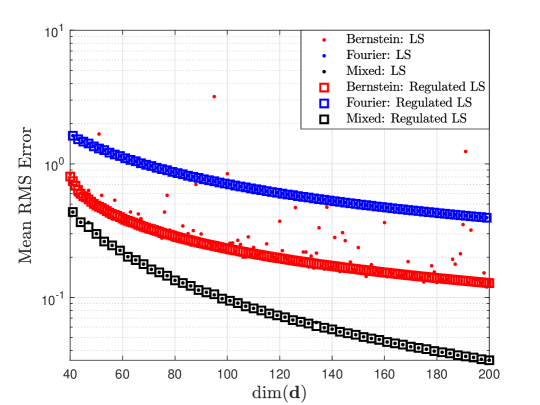
- 数值实验表明,该方法在计算效率和精度方面均有显著提升,尤其是在复杂周期性约束场景下。
📝 摘要(中文)
本文提出了一种新颖的混合Bernstein-Fourier逼近框架,专门为最优运动规划设计。该方法利用Bernstein多项式的均匀收敛性来处理非周期性行为,并通过傅里叶级数有效地捕捉周期性动态。论文建立了理论结果,包括函数、导数和积分逼近的均匀收敛性证明,以及详细的误差界限分析。进一步引入了一种正则化最小二乘法来确定逼近系数,增强了数值稳定性和实际适用性。在最优控制的背景下,证明了近似解对于其连续对应物的可行性和一致性。扩展了协向量映射定理,为逼近对偶变量提供了理论保证,这对于验证庞特里亚金极大值原理中的必要最优性条件至关重要。数值例子表明,该方法在具有复杂周期性约束和动态的场景中,在计算效率和精度方面表现出卓越的性能。
🔬 方法详解
问题定义:论文旨在解决自主系统中最优轨迹生成问题,尤其是在存在周期性行为时,现有数值方法效率低下的问题。传统的数值方法在处理具有复杂周期性约束和动态的轨迹规划时,往往面临计算量大、精度不足的挑战。此外,当传感器需要等距时间采样时,问题会变得更加复杂。
核心思路:论文的核心思路是将Bernstein多项式和傅里叶级数结合起来,形成一种混合逼近方法。Bernstein多项式擅长逼近非周期性函数,而傅里叶级数则非常适合表示周期性函数。通过这种混合方法,可以更有效地表示和优化具有周期性行为的轨迹。
技术框架:该方法主要包含以下几个阶段:1) 使用混合Bernstein-Fourier基函数表示轨迹;2) 建立最优控制问题,包括目标函数和约束条件;3) 使用正则化最小二乘法确定逼近系数,提高数值稳定性;4) 利用协向量映射定理,保证近似解的 optimality;5) 通过数值实验验证方法的有效性。
关键创新:该方法最重要的创新点在于将Bernstein多项式和傅里叶级数结合起来,形成一种混合逼近框架。这种混合方法能够同时利用Bernstein多项式的均匀收敛性和傅里叶级数表示周期性函数的优势,从而更有效地解决具有周期性行为的最优轨迹生成问题。此外,论文还扩展了协向量映射定理,为近似解的对偶变量提供了理论保证。
关键设计:论文采用正则化最小二乘法来确定逼近系数,以提高数值稳定性。正则化项的选择需要仔细考虑,以平衡逼近精度和数值稳定性。此外,论文还详细分析了误差界限,为选择合适的Bernstein多项式和傅里叶级数的阶数提供了指导。具体参数设置和损失函数的设计需要根据具体的应用场景进行调整。
🖼️ 关键图片
📊 实验亮点
数值实验表明,该混合Bernstein-Fourier方法在计算效率和精度方面均优于传统方法。在具有复杂周期性约束和动态的场景中,该方法能够显著减少计算时间,并提高轨迹的精度。具体性能提升数据在论文中进行了详细展示,并与现有基线方法进行了对比。
🎯 应用场景
该研究成果可应用于各种自主系统,如无人机、机器人和自动驾驶汽车等。特别是在需要精确控制和高效计算的场景下,例如无人机编队飞行、机器人重复性作业和自动驾驶车辆的路径规划等,该方法具有重要的应用价值。该方法能够提高轨迹生成的效率和精度,从而提升自主系统的整体性能和可靠性。
📄 摘要(原文)
Efficient trajectory generation is crucial for autonomous systems; however, current numerical methods often struggle to handle periodic behaviors effectively, particularly when the onboard sensors require equidistant temporal sampling. This paper introduces a novel mixed Bernstein-Fourier approximation framework tailored explicitly for optimal motion planning. Our proposed methodology leverages the uniform convergence properties of Bernstein polynomials for nonperiodic behaviors while effectively capturing periodic dynamics through the Fourier series. Theoretical results are established, including uniform convergence proofs for approximations of functions, derivatives, and integrals, as well as detailed error bound analyses. We further introduce a regulated least squares approach for determining approximation coefficients, enhancing numerical stability and practical applicability. Within an optimal control context, we establish the feasibility and consistency of approximated solutions to their continuous counterparts. We also extend the covector mapping theorem, providing theoretical guarantees for approximating dual variables crucial in verifying the necessary optimality conditions from Pontryagin's Maximum Principle. Numerical examples illustrate the method's superior performance, demonstrating substantial improvements in computational efficiency and precision in scenarios with complex periodic constraints and dynamics. Our mixed Bernstein-Fourier methodology thus presents a robust, theoretically grounded, and computationally efficient approach for advanced optimal trajectory planning in autonomous systems.