Recursive feasibility for stochastic MPC and the rationale behind fixing flat tires
作者: Mirko Fiacchini, Martina Mammarella, Fabrizio Dabbene
分类: math.OC, eess.SY
发布日期: 2025-04-24
💡 一句话要点
针对有界扰动线性系统,提出基于状态测量的递归可行随机模型预测控制方案
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 随机模型预测控制 SMPC 机会约束 递归可行性 无界扰动 椭球可达集 约束松弛
📋 核心要点
- 传统SMPC方法在处理无界扰动时,难以保证机会约束的满足,存在违反约束的风险。
- 论文提出一种基于测量状态初始化的SMPC方案,利用椭球概率可达集和约束松弛来保证递归可行性。
- 该方案能保证闭环机会约束满足,并随着时间推移,约束松弛需求降低,轨迹趋向无约束LQR不变区域。
📝 摘要(中文)
本文研究了受无界扰动影响的线性系统的随机模型预测控制(SMPC)方案设计问题。本文的贡献在于一种基于测量状态的初始化策略。首先,由于无界噪声存在违反机会约束的非零概率,我们引入了基于椭球的概率可达集,并包含约束松弛以恢复以测量状态为条件的递归可行性。其次,我们证明了这种新的SMPC方案的解保证了在最小松弛下闭环机会约束的满足。最后,我们证明了,在期望上,放松约束的需求会随着时间的推移而消失,这导致闭环轨迹被引导到无约束的LQR不变区域。该新型SMPC方案被证明满足以状态实现为条件的递归可行性,并通过数值例子展示了其相对于开环初始化方案的优越性。
🔬 方法详解
问题定义:论文旨在解决线性系统在受到无界扰动时,传统随机模型预测控制(SMPC)方法难以保证机会约束满足的问题。现有方法通常采用开环初始化,对初始状态的依赖性强,且难以处理无界扰动带来的约束违反风险。因此,需要设计一种鲁棒的SMPC方案,能够在无界扰动下保证系统的安全性和性能。
核心思路:论文的核心思路是利用测量状态进行初始化,并结合椭球概率可达集和约束松弛技术,来保证SMPC的递归可行性。通过测量当前状态,可以更准确地估计系统的未来状态,从而减少保守性。椭球概率可达集用于描述系统在扰动下的状态范围,约束松弛则允许在一定程度上违反约束,以保证可行性。
技术框架:该SMPC方案主要包含以下几个模块:1) 状态测量模块:获取系统的当前状态。2) 椭球概率可达集计算模块:基于当前状态和扰动模型,计算系统在未来一段时间内的概率可达集。3) 优化问题构建模块:构建一个优化问题,目标是最小化控制成本,同时满足状态约束和输入约束。为了处理无界扰动,引入了约束松弛变量。4) 控制律生成模块:求解优化问题,得到最优控制序列,并将第一个控制输入作用于系统。5) 递归可行性验证模块:验证在新的状态下,该方案是否仍然可行。
关键创新:论文的关键创新在于提出了一种基于测量状态初始化的SMPC方案,并结合椭球概率可达集和约束松弛技术,实现了在无界扰动下的递归可行性。与传统的开环初始化方法相比,该方案能够更好地利用状态信息,减少保守性,并提高系统的鲁棒性。此外,论文还证明了随着时间的推移,约束松弛的需求会逐渐降低,从而使系统趋向于无约束的LQR最优控制。
关键设计:论文中,椭球概率可达集的计算是关键。论文采用了一种基于线性矩阵不等式(LMI)的方法来计算椭球,并保证该椭球包含一定概率下的所有可能状态。约束松弛变量的引入允许在一定程度上违反状态约束,但需要对松弛变量进行惩罚,以避免过度松弛。优化问题的目标函数通常包含控制成本和状态成本,以及对松弛变量的惩罚项。具体参数的选择需要根据具体的系统和扰动模型进行调整。
🖼️ 关键图片
📊 实验亮点
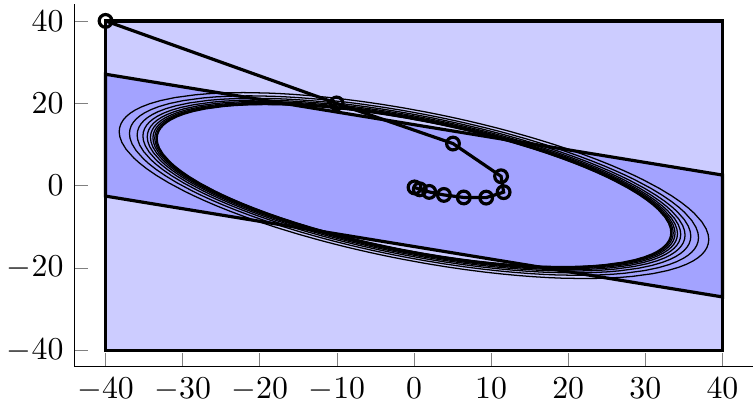
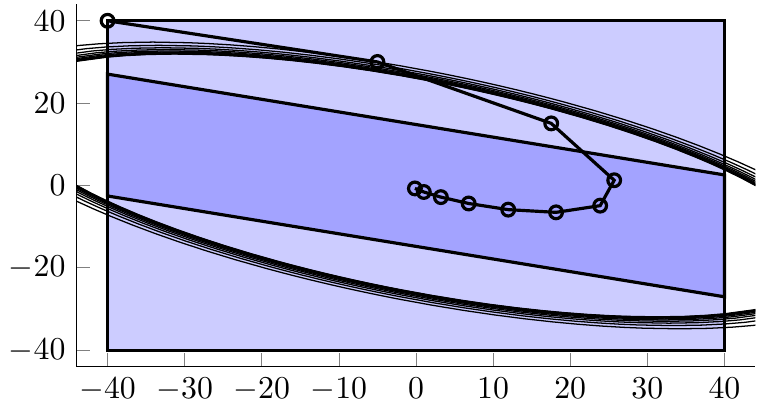
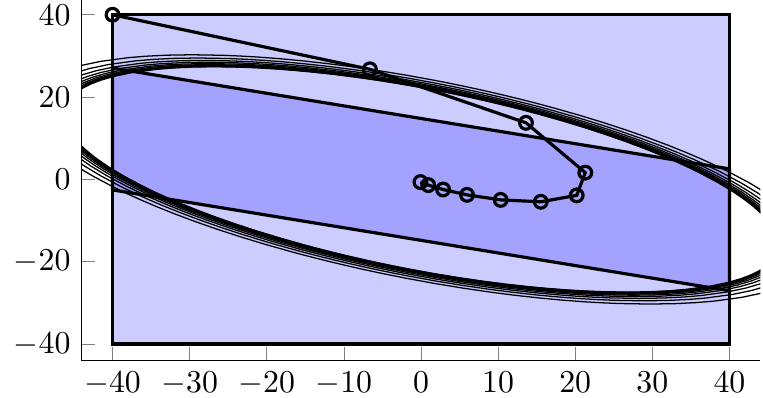
数值实验表明,该SMPC方案能够有效地处理无界扰动,并保证闭环系统的稳定性。与传统的开环初始化方案相比,该方案能够显著降低约束违反的概率,并提高系统的性能。实验结果还验证了随着时间的推移,约束松弛的需求会逐渐降低,从而使系统趋向于无约束的LQR最优控制。
🎯 应用场景
该研究成果可应用于各种受不确定扰动影响的线性系统的控制,例如自动驾驶、机器人导航、航空航天等领域。通过该方法,可以提高系统在复杂环境下的安全性和可靠性,并降低对系统模型的精确度要求。未来,该方法可以进一步扩展到非线性系统和更复杂的约束条件。
📄 摘要(原文)
In this paper, we address the problem of designing stochastic model predictive control (SMPC) schemes for linear systems affected by unbounded disturbances. The contribution of the paper is rooted in a measured-state initialization strategy. First, due to the nonzero probability of violating chance-constraints in the case of unbounded noise, we introduce ellipsoidal-based probabilistic reachable sets and we include constraint relaxations to recover recursive feasibility conditioned to the measured state. Second, we prove that the solution of this novel SMPC scheme guarantees closed-loop chance constraints satisfaction under minimum relaxation. Last, we demonstrate that, in expectation, the need of relaxing the constraints vanishes over time, which leads the closed-loop trajectories steered towards the unconstrained LQR invariant region. This novel SMPC scheme is proven to satisfy the recursive feasibility conditioned to the state realization, and its superiority with respect to open-loop initialization schemes is shown through numerical examples.