Adaptive Task Space Non-Singular Terminal Super-Twisting Sliding Mode Control of a 7-DOF Robotic Manipulator
作者: L. Wan, S. Smith, Y. -J. Pan, E. Witrant
分类: eess.SY, cs.RO
发布日期: 2025-04-17 (更新: 2025-08-22)
备注: Accepted for publication in IEEE Transactions on Industrial Electronics. 12 pages, 8 figures
💡 一句话要点
提出自适应增益的非奇异终端超螺旋滑模控制,用于7自由度机器人鲁棒轨迹跟踪。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱八:物理动画 (Physics-based Animation)
关键词: 机器人控制 滑模控制 非奇异终端滑模 超螺旋算法 自适应控制 轨迹跟踪 鲁棒控制
📋 核心要点
- 高自由度机器人轨迹跟踪面临颤振、未知扰动和旋转运动跟踪等难题,传统方法难以保证鲁棒性和精度。
- 提出自适应增益的非奇异终端超螺旋滑模控制(NT-STSM),通过自适应调整增益来抑制扰动,实现更精确的轨迹跟踪。
- 仿真和硬件实验验证了该控制器在未知扰动下的鲁棒性和准确性,并降低了控制工作量,适用于灵巧操作。
📝 摘要(中文)
本文提出了一种新的任务空间非奇异终端超螺旋滑模(NT-STSM)控制器,该控制器具有自适应增益,用于7自由度机器人机械臂的鲁棒轨迹跟踪。该方法解决了颤振、未知扰动和旋转运动跟踪等挑战,使其适用于灵巧操作任务中的高自由度机械臂。论文提供了严格的有界性证明,为实际应用中的增益选择提供了指导。仿真和硬件实验表明,与其它NT-STSM控制器和传统控制器相比,所提出的控制器在未知扰动下具有鲁棒、准确的跟踪性能,并降低了控制工作量。结果表明,所提出的NT-STSM控制器减轻了复杂运动中的颤振和不稳定性,使其成为灵巧机器人操作和各种工业应用的可行解决方案。
🔬 方法详解
问题定义:论文旨在解决7自由度机器人机械臂在存在未知扰动的情况下,进行精确和鲁棒轨迹跟踪的问题。现有方法,如传统滑模控制,容易产生颤振现象,影响控制精度和系统稳定性。此外,高自由度机械臂的复杂动力学和旋转运动的特殊性也增加了控制难度。
核心思路:论文的核心思路是利用非奇异终端超螺旋滑模控制(NT-STSM)结合自适应增益调整机制。NT-STSM能够保证有限时间收敛,并减轻传统滑模控制的颤振问题。自适应增益则可以根据实际扰动情况动态调整控制器的强度,从而提高系统的鲁棒性。
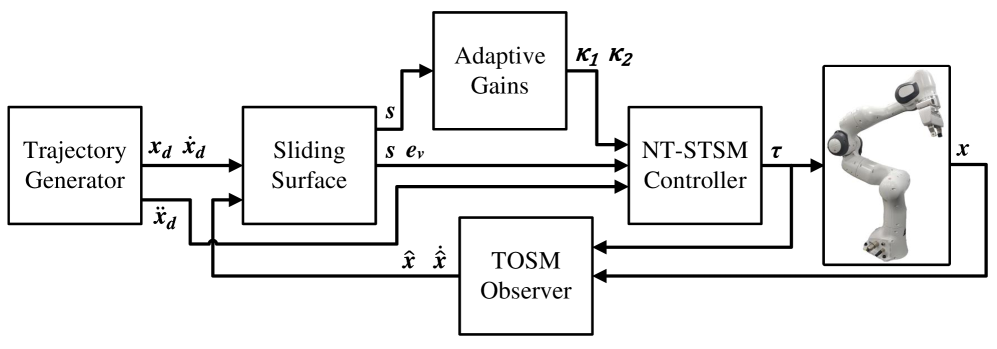
技术框架:该控制系统的整体框架包括以下几个主要部分:首先,定义任务空间中的期望轨迹和实际轨迹,计算跟踪误差。然后,设计非奇异终端滑模面,将轨迹跟踪问题转化为滑模面的镇定问题。接着,利用超螺旋算法设计控制律,保证系统状态在有限时间内到达滑模面。最后,采用自适应律动态调整控制器的增益,以补偿未知扰动。
关键创新:该论文的关键创新在于将自适应增益调整机制与非奇异终端超螺旋滑模控制相结合。传统的NT-STSM控制器通常采用固定的控制增益,难以适应时变和未知的扰动。通过引入自适应律,控制器可以根据实际的跟踪误差和扰动估计,在线调整控制增益,从而提高系统的鲁棒性和适应性。
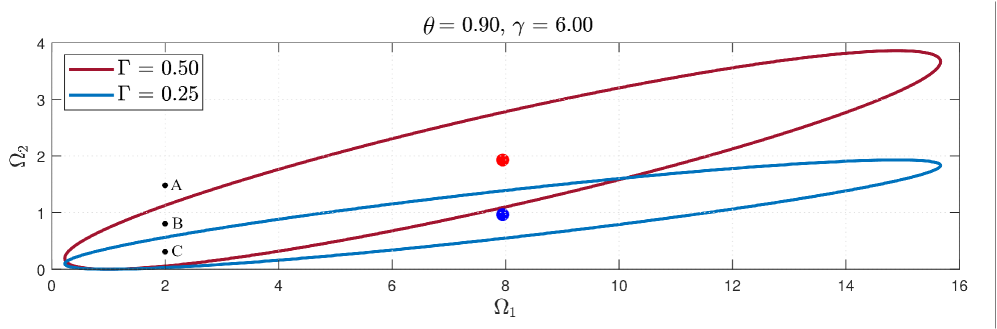
关键设计:关键设计包括以下几个方面:首先,滑模面的设计需要保证非奇异性,避免出现奇异点。其次,超螺旋算法的参数选择需要仔细调整,以保证系统的稳定性和收敛速度。最后,自适应律的设计需要保证增益的有界性,避免出现增益漂移现象。论文提供了增益选择的指导原则,并给出了有界性证明。
🖼️ 关键图片
📊 实验亮点
仿真和硬件实验结果表明,所提出的自适应NT-STSM控制器在未知扰动下实现了准确的轨迹跟踪,并有效降低了控制器的控制力。与传统的NT-STSM控制器和其它传统控制器相比,该控制器在鲁棒性和抗扰动能力方面表现出明显的优势,有效抑制了颤振现象,提高了系统的稳定性。
🎯 应用场景
该研究成果可广泛应用于需要高精度和高鲁棒性的机器人控制领域,例如工业自动化中的精密装配、医疗机器人中的微创手术、以及航空航天领域的空间操作等。通过提高机器人轨迹跟踪的精度和鲁棒性,可以显著提升生产效率和操作安全性,并为更复杂的机器人应用提供技术支持。
📄 摘要(原文)
This paper presents a new task-space Non-singular Terminal Super-Twisting Sliding Mode (NT-STSM) controller with adaptive gains for robust trajectory tracking of a 7-DOF robotic manipulator. The proposed approach addresses the challenges of chattering, unknown disturbances, and rotational motion tracking, making it suited for high-DOF manipulators in dexterous manipulation tasks. A rigorous boundedness proof is provided, offering gain selection guidelines for practical implementation. Simulations and hardware experiments with external disturbances demonstrate the proposed controller's robust, accurate tracking with reduced control effort under unknown disturbances compared to other NT-STSM and conventional controllers. The results demonstrated that the proposed NT-STSM controller mitigates chattering and instability in complex motions, making it a viable solution for dexterous robotic manipulations and various industrial applications.