Robust MPC for Uncertain Linear Systems -- Combining Model Adaptation and Iterative Learning
作者: Hannes Petrenz, Johannes Köhler, Francesco Borrelli
分类: eess.SY, math.OC
发布日期: 2025-04-15 (更新: 2025-09-01)
备注: Github link to the example: https://github.com/HannesPetrenz/RALMPC_Linear_Uncertain_Systems
💡 一句话要点
提出一种鲁棒自适应学习MPC框架,结合模型自适应和迭代学习,用于不确定线性系统。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 鲁棒模型预测控制 自适应学习 迭代学习 不确定线性系统 集员估计
📋 核心要点
- 现有鲁棒MPC方法在处理参数不确定性时,计算复杂度高,且难以充分利用迭代任务中的数据信息。
- 该论文提出结合模型自适应和迭代学习的鲁棒MPC框架,在线优化参数估计,并从数据中学习终端代价和终端集。
- 数值实验表明,该方法在质量-弹簧-阻尼系统中,相较于传统鲁棒自适应MPC,计算效率和控制性能均有所提升。
📝 摘要(中文)
本文提出了一种鲁棒自适应学习模型预测控制(MPC)框架,用于参数不确定性和加性扰动下的线性系统执行迭代任务。该方法使用集员估计在线优化参数估计。通过从数据中学习终端代价来提高迭代性能。使用终端集来保证安全性,该终端集也通过迭代学习得到。所提出的方法保证了递归可行性、约束满足以及闭环代价的鲁棒界限。对质量-弹簧-阻尼系统的数值模拟表明,与没有迭代学习终端成分的鲁棒自适应MPC方案相比,计算效率和控制性能均有所提高。
🔬 方法详解
问题定义:论文旨在解决线性系统在存在参数不确定性和加性扰动的情况下,如何设计鲁棒且高效的模型预测控制(MPC)器的问题。传统的鲁棒MPC方法通常需要保守的参数范围估计,导致计算复杂度高,并且无法有效利用迭代任务中积累的数据信息来提升控制性能。
核心思路:论文的核心思路是将模型自适应和迭代学习相结合。通过在线集员估计方法不断优化参数估计,减小不确定性范围;同时,利用迭代学习从数据中学习终端代价和终端集,从而提高控制性能并保证安全性。这种结合使得控制器能够更好地适应系统的不确定性,并随着迭代次数的增加而不断改进。
技术框架:该框架包含以下主要模块:1) 集员估计器:用于在线估计系统参数的不确定性集合。2) 鲁棒MPC控制器:基于当前的参数不确定性集合,设计鲁棒MPC策略,保证递归可行性和约束满足。3) 迭代学习模块:从历史数据中学习终端代价和终端集,用于改进MPC控制器的性能和安全性。整体流程是:在每次迭代中,首先利用集员估计器更新参数估计,然后基于更新后的参数估计设计鲁棒MPC控制器,最后利用迭代学习模块更新终端代价和终端集。
关键创新:该论文的关键创新在于将模型自适应和迭代学习有机结合,共同提升鲁棒MPC的性能。传统的鲁棒MPC通常只关注于保证在最坏情况下的性能,而忽略了利用数据进行学习的可能性。该论文通过迭代学习终端代价和终端集,使得控制器能够随着迭代次数的增加而不断改进,从而在保证鲁棒性的同时,提高了控制性能。
关键设计:集员估计器采用椭球集作为参数不确定性集合的表示,并使用递归最小体积椭球算法进行更新。鲁棒MPC控制器采用min-max优化方法,求解在最坏情况下的最优控制策略。迭代学习模块使用高斯过程回归等方法,从历史数据中学习终端代价函数,并使用可行集算法构造终端集。终端代价的学习目标是最小化迭代过程中的累积代价,终端集的设计目标是保证状态能够稳定在目标区域附近。
🖼️ 关键图片
📊 实验亮点
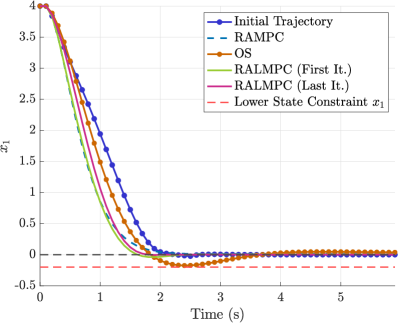
数值模拟结果表明,在质量-弹簧-阻尼系统中,与没有迭代学习终端成分的鲁棒自适应MPC方案相比,所提出的方法能够显著提高计算效率和控制性能。具体而言,该方法能够在更短的时间内找到可行的控制策略,并且能够实现更小的跟踪误差和更低的控制成本。此外,该方法还能够保证系统的递归可行性和约束满足,从而确保系统的安全性。
🎯 应用场景
该研究成果可应用于各种需要重复执行任务且系统参数存在不确定性的控制场景,例如机器人重复轨迹跟踪、自动化生产线中的重复操作、以及其他需要自适应学习和鲁棒控制的工业应用。通过迭代学习,系统能够不断优化控制策略,提高生产效率和产品质量,降低能源消耗。
📄 摘要(原文)
This paper presents a robust adaptive learning Model Predictive Control (MPC) framework for linear systems with parametric uncertainties and additive disturbances performing iterative tasks. The approach refines the parameter estimates online using set-membership estimation. Performance enhancement over iterations is achieved by learning the terminal cost from data. Safety is enforced using a terminal set, which is also learned iteratively. The proposed method guarantees recursive feasibility, constraint satisfaction, and a robust bound on the closed-loop cost. Numerical simulations on a mass-spring-damper system demonstrate improved computational efficiency and control performance compared to a robust adaptive MPC scheme without iterative learning of the terminal ingredients.