Robust Output-Feedback MPC for Nonlinear Systems with Applications to Robotic Exploration
作者: Scott Brown, Mohammad Khajenejad, Aamodh Suresh, Sonia Martinez
分类: eess.SY
发布日期: 2025-04-14
备注: Accepted for publication in L-CSS
💡 一句话要点
提出一种鲁棒输出反馈MPC方法,用于解决非线性系统控制问题,并应用于机器人探索。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 模型预测控制 鲁棒控制 非线性系统 区间值预测 机器人探索
📋 核心要点
- 现有非线性系统MPC方法在噪声干扰下预测精度不足,导致控制性能下降。
- 提出基于区间值预测器的鲁棒输出反馈MPC,通过参数化控制输入减小预测区间宽度。
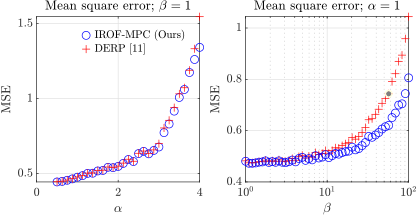
- 数值实验表明,该控制器在噪声环境下性能优于现有方法,并在机器人探索仿真中验证有效性。
📝 摘要(中文)
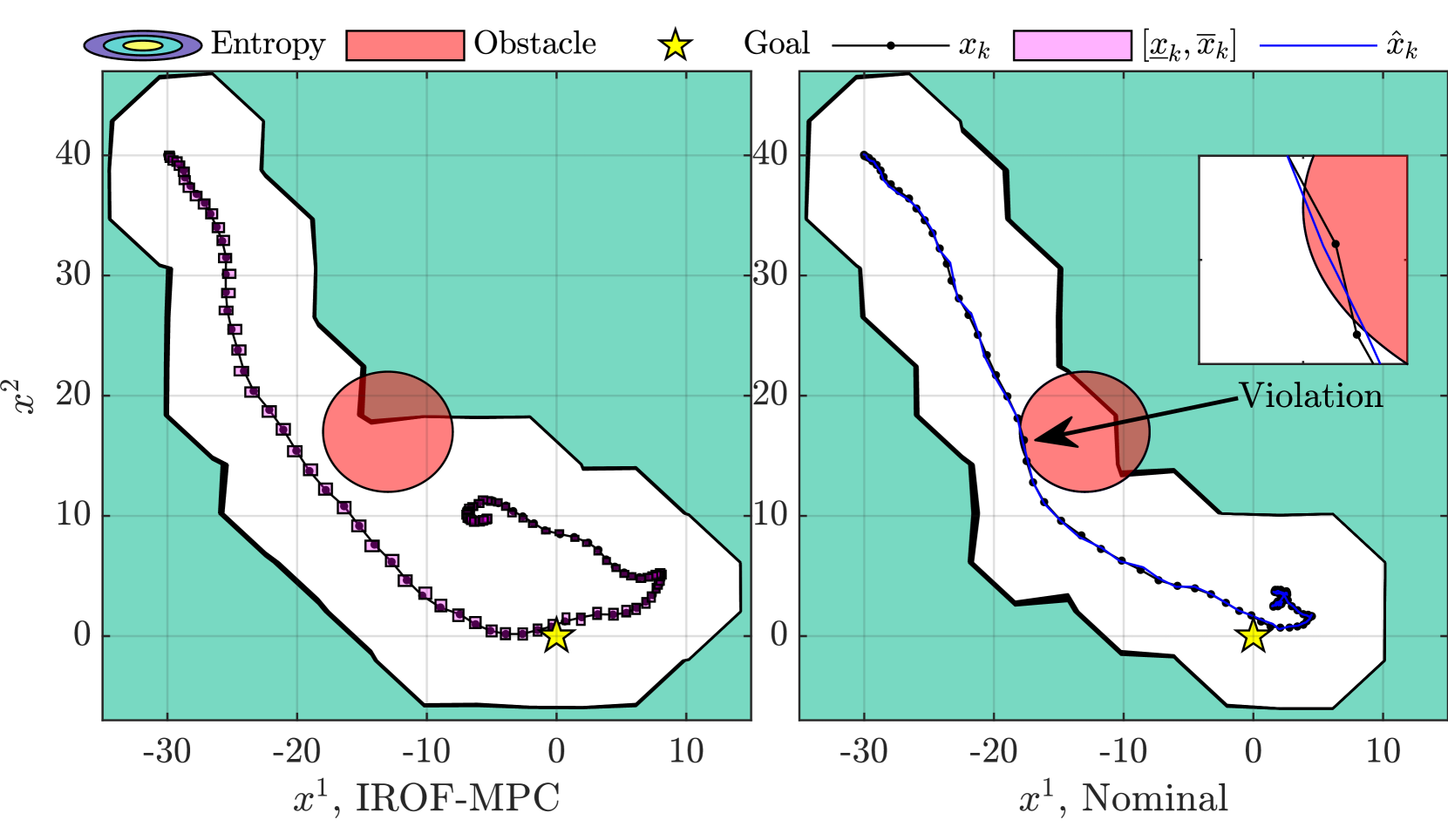
本文提出了一种针对一类非线性离散时间系统的鲁棒输出反馈模型预测控制(MPC)的新方法。我们提出了一种新颖的区间值预测器,该预测器在给定状态的初始估计值后,生成保证包含系统未来轨迹的区间。通过使用初始稳定反馈项参数化控制输入,与现有方法相比,我们能够减小预测状态区间的宽度。我们通过数值比较证明了这一点,结果表明我们的控制器在存在大量噪声的情况下表现更好。最后,我们提出了一个机器人导航场景的仿真研究,其中我们将时变熵项纳入成本函数中,以便自主探索不确定的区域。
🔬 方法详解
问题定义:论文旨在解决非线性离散时间系统在存在噪声和不确定性情况下的鲁棒控制问题。传统的模型预测控制(MPC)方法在处理非线性系统时,由于模型误差和噪声的影响,预测精度会显著下降,导致控制性能降低甚至系统不稳定。特别是对于输出反馈MPC,只能通过输出量来估计状态,状态估计的误差会进一步加剧预测的不确定性。
核心思路:论文的核心思路是设计一种区间值预测器,该预测器能够为系统的未来状态提供一个有保证的区间范围,确保真实状态始终位于该区间内。同时,通过引入初始稳定反馈项来参数化控制输入,从而在一定程度上抑制噪声的影响,减小预测状态区间的宽度,提高控制的鲁棒性。
技术框架:该方法主要包含以下几个关键模块:1) 区间值预测器:基于系统的非线性动态模型,利用区间算术或类似技术,计算未来状态的区间范围。2) 输出反馈控制器:根据系统的输出量估计当前状态,并利用该状态信息设计控制输入。3) 优化器:在每个控制周期,通过求解一个优化问题,确定最优的控制输入序列,使得系统在满足约束条件的同时,最小化预定义的成本函数。4) 鲁棒性保证:通过理论分析或数值验证,确保在存在噪声和不确定性的情况下,系统能够保持稳定性和安全性。
关键创新:论文的关键创新在于提出了一种新颖的区间值预测器,并结合初始稳定反馈项来参数化控制输入。这种方法能够在保证预测状态区间包含真实状态的前提下,有效地减小预测区间的宽度,从而提高控制器的鲁棒性。与传统的基于点估计的MPC方法相比,该方法能够更好地处理系统中的不确定性。
关键设计:论文的关键设计包括:1) 区间值预测器的具体实现方式,例如采用区间算术、多面体逼近等方法。2) 初始稳定反馈项的设计,需要保证闭环系统的稳定性,并尽可能减小噪声的影响。3) 成本函数的设计,需要综合考虑系统的性能指标(例如跟踪误差、控制能量)和安全性约束。4) 优化问题的求解算法,需要保证求解效率和全局最优性。
🖼️ 关键图片

📊 实验亮点
论文通过数值实验验证了所提出方法的有效性。实验结果表明,在存在大量噪声的情况下,该控制器的性能优于现有的MPC方法,能够更准确地预测系统状态,并实现更好的控制效果。此外,在机器人导航仿真中,该方法能够成功引导机器人自主探索未知区域,并有效地避免障碍物。
🎯 应用场景
该研究成果可应用于各种需要鲁棒控制的非线性系统,例如机器人导航、自动驾驶、航空航天等领域。特别是在环境感知存在不确定性的情况下,该方法能够提高系统的安全性和可靠性。例如,在机器人自主探索未知环境时,可以利用该方法规划出一条安全可靠的路径,避免碰撞和死锁。
📄 摘要(原文)
This paper introduces a novel method for robust output-feedback model predictive control (MPC) for a class of nonlinear discrete-time systems. We propose a novel interval-valued predictor which, given an initial estimate of the state, produces intervals which are guaranteed to contain the future trajectory of the system. By parameterizing the control input with an initial stabilizing feedback term, we are able to reduce the width of the predicted state intervals compared to existing methods. We demonstrate this through a numerical comparison where we show that our controller performs better in the presence of large amounts of noise. Finally, we present a simulation study of a robot navigation scenario, where we incorporate a time-varying entropy term into the cost function in order to autonomously explore an uncertain area.