Control Barrier Function Synthesis for Nonlinear Systems with Dual Relative Degree
作者: Gilbert Bahati, Ryan K. Cosner, Max H. Cohen, Ryan M. Bena, Aaron D. Ames
分类: eess.SY
发布日期: 2025-04-01 (更新: 2025-09-03)
💡 一句话要点
针对具有双重相对阶非线性系统,提出可构造的控制屏障函数综合方法。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 控制屏障函数 非线性系统 双重相对阶 安全控制 机器人控制
📋 核心要点
- 现有控制屏障函数(CBFs)在非线性系统中的构造困难,限制了其应用。
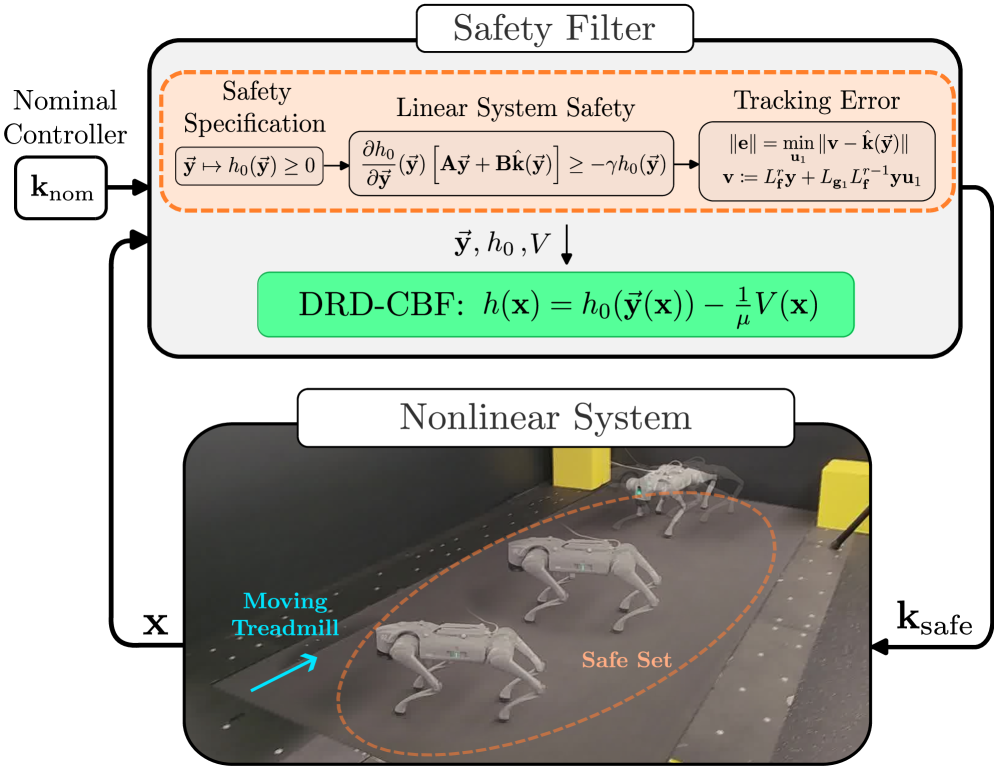
- 论文提出双重相对阶CBFs (DRD-CBFs),结合CBF与李雅普诺夫函数,实现可构造的CBF综合。
- 通过四足机器人和四旋翼飞行器平台上的仿真和硬件实验验证了该方法的有效性。
📝 摘要(中文)
控制屏障函数(CBFs)是综合安全控制行为的强大工具;然而,对于一般的非线性系统,构造CBFs仍然很困难。本文针对具有双重相对阶的系统,提供了一个可构造的CBFs综合框架。双重相对阶是指不同的输入以两种不同的微分阶数影响输出,这在具有基于方向的驱动系统中很常见,例如单轮车和四旋翼飞行器。特别地,我们提出了双重相对阶CBFs (DRD-CBFs),并表明这些DRD-CBFs可以被构造性地综合,并用于保证系统的安全性。我们的方法通过利用双重相对阶属性来构造DRD-CBFs——将积分器链的CBF与证明该线性系统生成的安全输入跟踪的李雅普诺夫函数相结合。我们将这些结果应用于双重相对阶系统,包括在四足机器人和四旋翼机器人平台上的仿真和硬件实验。
🔬 方法详解
问题定义:论文旨在解决非线性系统中控制屏障函数(CBFs)难以构造的问题,尤其针对具有双重相对阶的系统。现有方法在处理此类系统时,缺乏系统性的构造方法,难以保证控制策略的安全性。
核心思路:论文的核心思路是利用双重相对阶系统的特性,将CBF的设计分解为两个部分:一部分是针对简化后的线性积分器链设计CBF,另一部分是设计李雅普诺夫函数来保证系统跟踪该线性系统产生的安全输入。通过这种方式,将复杂的非线性系统CBF构造问题转化为相对简单的线性系统CBF和李雅普诺夫函数设计问题。
技术框架:该方法首先识别系统的双重相对阶特性,然后针对简化后的线性积分器链设计CBF,确保该线性系统的安全性。接着,设计一个李雅普诺夫函数,用于保证原始非线性系统能够跟踪线性系统产生的安全输入。最后,将这两个部分结合起来,形成一个DRD-CBF,并利用二次规划等方法,设计安全控制器。
关键创新:该方法最重要的创新在于提出了DRD-CBF的概念,并提供了一种可构造的CBF综合框架,专门针对具有双重相对阶的非线性系统。与传统的CBF方法相比,该方法避免了直接对复杂非线性系统进行CBF设计,而是通过分解问题,降低了设计难度,提高了CBF构造的成功率。
关键设计:关键设计包括:1) 线性积分器链的CBF设计,需要选择合适的参数以保证线性系统的安全性;2) 李雅普诺夫函数的设计,需要保证其能够有效地衡量原始系统与线性系统之间的跟踪误差,并确保跟踪误差能够收敛到零;3) 二次规划问题的构建,需要合理设置目标函数和约束条件,以保证控制器的安全性和性能。
🖼️ 关键图片


📊 实验亮点
论文通过在四足机器人和四旋翼飞行器平台上进行仿真和硬件实验,验证了DRD-CBF方法的有效性。实验结果表明,使用DRD-CBF设计的控制器能够有效地保证系统的安全性,避免碰撞等危险情况的发生。此外,实验还表明,该方法具有较好的鲁棒性,能够适应一定的环境变化和模型误差。
🎯 应用场景
该研究成果可广泛应用于具有双重相对阶特性的非线性控制系统,例如无人机、机器人、车辆等。通过使用DRD-CBF,可以有效地保证这些系统在复杂环境中的安全性,避免碰撞等危险情况的发生。该方法在自主导航、人机协作等领域具有重要的应用价值,并有望推动智能机器人技术的发展。
📄 摘要(原文)
Control barrier functions (CBFs) are a powerful tool for synthesizing safe control actions; however, constructing CBFs remains difficult for general nonlinear systems. In this work, we provide a constructive framework for synthesizing CBFs for systems with dual relative degree -- where different inputs influence the outputs at two different orders of differentiation; this is common in systems with orientation-based actuation, such as unicycles and quadrotors. In particular, we propose dual relative degree CBFs (DRD-CBFs) and show that these DRD-CBFs can be constructively synthesized and used to guarantee system safety. Our method constructs DRD-CBFs by leveraging the dual relative degree property -- combining a CBF for an integrator chain with a Lyapunov function certifying the tracking of safe inputs generated for this linear system. We apply these results to dual relative degree systems, both in simulation and experimentally on hardware using quadruped and quadrotor robotic platforms.