An ANN-Enhanced Approach for Flatness-Based Constrained Control of Nonlinear Systems
作者: Huu-Thinh Do, Ionela Prodan, Florin Stoican
分类: eess.SY, math.OC
发布日期: 2025-03-31 (更新: 2025-10-18)
💡 一句话要点
提出基于ANN的平面系统约束控制方法,解决非线性系统约束控制难题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 非线性系统控制 约束控制 神经网络 反馈线性化 模型预测控制
📋 核心要点
- 非线性系统约束控制面临挑战,传统方法在处理复杂约束时表现不足。
- 利用神经网络将扭曲的约束表示为多面体并集,便于混合整数规划求解。
- 将该方法集成到控制李雅普诺夫函数和模型预测控制中,提升控制效率。
📝 摘要(中文)
本研究探索了使用修正线性单元神经网络(ReLU ANN)在微分平面系统中实现约束控制。平面系统具有反馈线性化的优势,即可以通过适当的变量变换将系统线性化。然而,线性化会导致约束描述在几何上发生扭曲。研究结果表明,通过使用神经网络,这些约束可以表示为多面体的并集,从而可以使用混合整数规划工具来保证约束满足。进一步分析了这种表征与基于控制李雅普诺夫函数和模型预测控制(MPC)等高效设置的集成。有趣的是,这种描述还允许我们显式地计算非线性系统MPC问题的解。提供了几个例子来说明该框架的有效性。
🔬 方法详解
问题定义:论文旨在解决非线性系统在存在约束条件下的控制问题。传统的反馈线性化方法虽然能简化系统动态,但会将原始约束扭曲,使得约束处理变得复杂。现有方法难以有效地处理这些扭曲的约束,导致控制性能下降甚至违反约束。
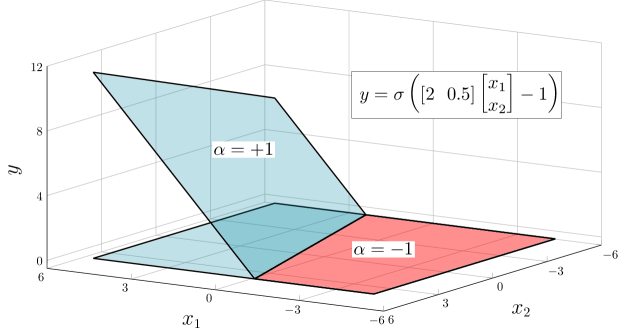
核心思路:论文的核心思路是利用神经网络来近似表示扭曲后的约束。具体来说,使用ReLU神经网络将复杂的约束区域近似为多个多面体的并集。这种表示方式的优势在于,多面体是线性约束,可以方便地使用混合整数规划(MIP)等工具进行优化求解,从而保证约束的满足。
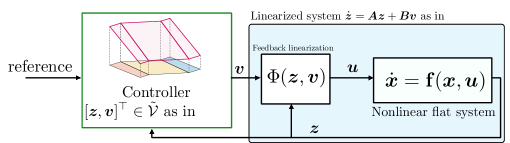
技术框架:整体框架包括以下几个主要步骤:1) 对非线性系统进行反馈线性化,得到线性化的系统动态和扭曲的约束;2) 使用ReLU神经网络学习扭曲的约束区域,将其表示为多面体的并集;3) 将多面体表示的约束集成到控制策略中,例如基于控制李雅普诺夫函数(CLF)的控制或模型预测控制(MPC);4) 使用混合整数规划求解器求解优化问题,得到满足约束的控制输入。
关键创新:论文的关键创新在于使用神经网络来近似表示和处理反馈线性化后扭曲的约束。与直接处理原始扭曲约束相比,使用多面体并集表示可以有效地利用混合整数规划等工具,从而保证约束满足。此外,该方法还能够显式地计算非线性系统MPC问题的解,提高了控制效率。
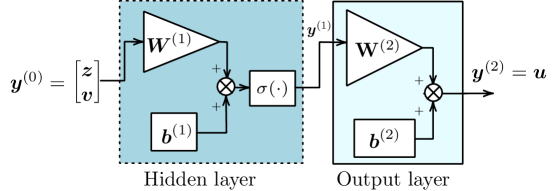
关键设计:论文中神经网络的关键设计包括:1) 使用ReLU激活函数,保证神经网络输出的分段线性性质,从而能够表示多面体;2) 通过训练神经网络,使其能够准确地近似扭曲的约束区域;3) 将神经网络的输出转化为混合整数规划的约束条件,以便使用求解器进行优化。具体的网络结构和训练方法需要根据具体的系统和约束进行调整。
🖼️ 关键图片
📊 实验亮点
论文通过多个例子验证了所提出框架的有效性。实验结果表明,使用神经网络表示约束并结合混合整数规划,能够有效地保证非线性系统在复杂约束下的控制性能。具体性能数据未知,但论文强调该方法能够显式计算非线性系统MPC问题的解,提升控制效率。
🎯 应用场景
该研究成果可应用于机器人、航空航天、汽车等领域,解决这些领域中非线性系统在复杂约束下的控制问题。例如,可以用于无人机的安全飞行控制,保证无人机在避开障碍物的同时完成任务;也可以用于汽车的自动驾驶,保证车辆在遵守交通规则的同时实现平稳驾驶。该方法具有很高的实际应用价值。
📄 摘要(原文)
Neural networks have proven practical for a synergistic combination of advanced control techniques. This work analyzes the implementation of rectified linear unit neural networks to achieve constrained control in differentially flat systems. Specifically, the class of flat systems enjoys the benefit of feedback linearizability, i.e., the systems can be linearized by means of a proper variable transformation. However, the price for linearizing the dynamics is that the constraint descriptions are distorted geometrically. Our results show that, by using neural networks, these constraints can be represented as a union of polytopes, enabling the use of mixed-integer programming tools to guarantee constraint satisfaction. We further analyze the integration of the characterization into efficient settings such as control Lyapunov function-based and model predictive control (MPC). Interestingly, this description also allows us to explicitly compute the solution of the MPC problem for the nonlinear system. Several examples are provided to illustrate the effectiveness of our framework.