Model-free Vehicle Rollover Prevention: A Data-driven Predictive Control Approach
作者: Mohammad R. Hajidavalloo, Kaixiang Zhang, Vaibhav Srivastava, Zhaojian Li
分类: eess.SY
发布日期: 2025-03-26
💡 一句话要点
提出一种基于数据驱动预测控制的无模型车辆侧翻预防方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 车辆侧翻预防 数据驱动控制 预测控制 无模型控制 奇异值分解
📋 核心要点
- 车辆侧翻事故频发,现有方法依赖精确的车辆动力学模型,难以适应复杂环境和车辆变化。
- 提出基于数据驱动预测控制(DeePC)的侧翻预防策略,直接从车辆输入输出数据学习控制策略,无需精确建模。
- 通过CarSim仿真验证,DeePC在轿车和卡车场景下均表现出良好的侧翻预防能力,优于线性模型预测控制。
📝 摘要(中文)
车辆侧翻是道路交通事故中导致伤亡的重要安全风险。本文提出了一种数据驱动预测控制(DeePC)方法来解决侧翻预防问题。DeePC是一种直接利用原始输入输出数据来维持车辆稳定性的控制策略,无需显式系统建模。为了提高计算效率,我们采用了一种降维DeePC,它利用基于奇异值分解的降维技术来显著降低计算复杂度,同时不影响控制性能。这种优化使得该方法能够实时应用于高维数据场景,使其更适用于实际车辆部署。通过轿车和多用途卡车场景中的高保真CarSim仿真验证了该方法的通用性以及在具有挑战性的驾驶条件下保持车辆稳定性的能力。与线性模型预测控制(LMPC)的比较结果表明,DeePC在防止侧翻的同时保持了机动性方面表现更优。研究结果表明,DeePC为侧翻预防提供了一种鲁棒且适应性强的解决方案,能够处理不同的道路和车辆条件。
🔬 方法详解
问题定义:车辆侧翻是严重的安全问题,传统的侧翻预防方法依赖于精确的车辆动力学模型。然而,建立精确的车辆模型非常困难,尤其是在车辆参数未知或随时间变化的情况下。此外,基于模型的控制方法对模型误差非常敏感,在实际应用中鲁棒性较差。因此,需要一种无需精确模型,且能适应不同车辆和路况的侧翻预防方法。
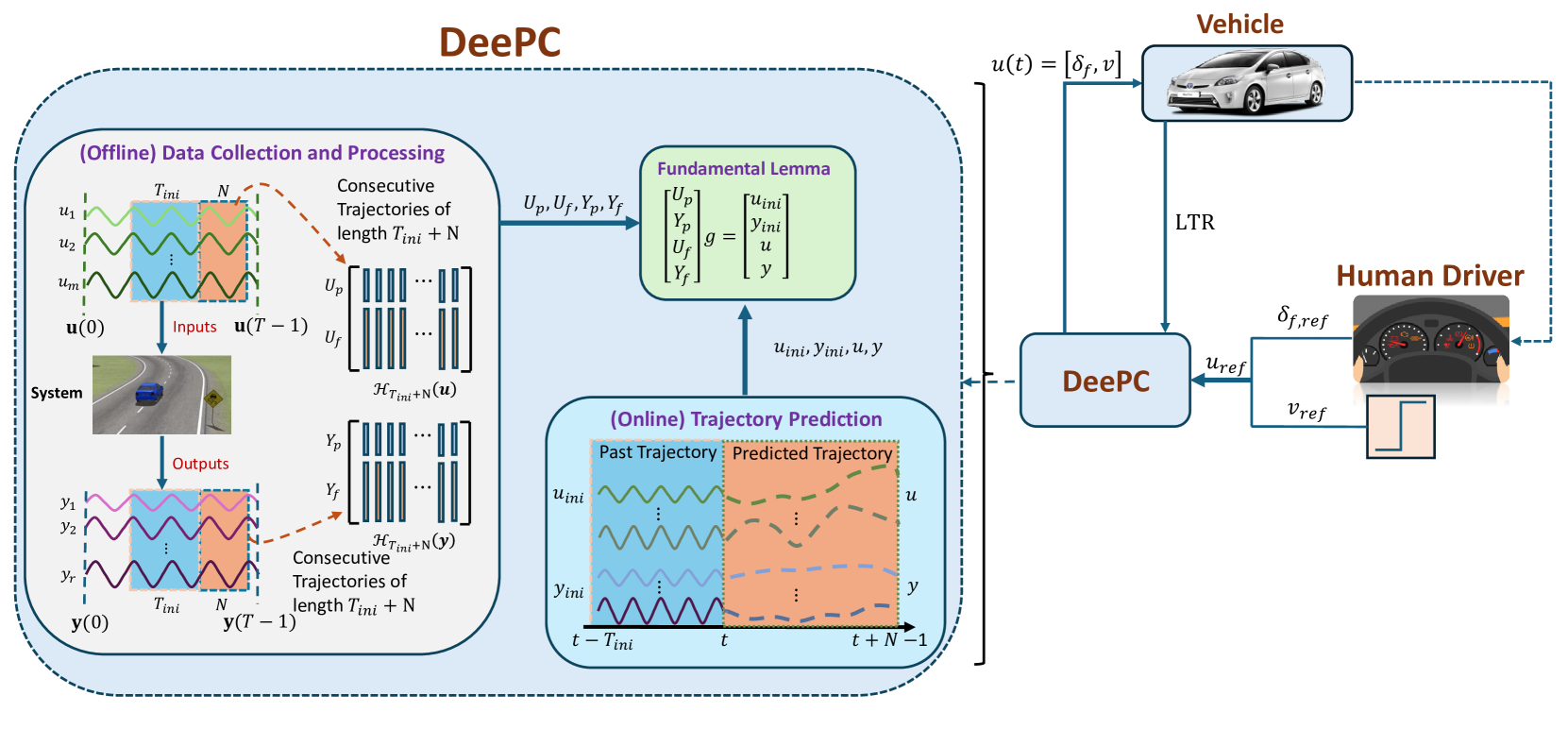
核心思路:本文的核心思路是利用数据驱动的预测控制(DeePC)方法,直接从车辆的输入输出数据中学习控制策略,而无需建立显式的车辆动力学模型。DeePC通过历史数据来预测车辆未来的状态,并根据预测结果优化控制输入,从而实现侧翻预防。这种方法可以避免模型误差带来的影响,提高控制系统的鲁棒性。
技术框架:该方法的技术框架主要包括数据采集、降维处理和预测控制三个阶段。首先,通过传感器采集车辆的输入输出数据,例如方向盘转角、车速、横摆角速度等。然后,利用奇异值分解(SVD)对数据进行降维处理,以降低计算复杂度。最后,利用降维后的数据构建预测模型,并采用优化算法求解控制输入,实现侧翻预防。
关键创新:该方法最重要的技术创新点在于采用了数据驱动的预测控制(DeePC)方法,避免了对车辆动力学模型的依赖。与传统的基于模型的控制方法相比,DeePC可以直接从数据中学习控制策略,具有更强的适应性和鲁棒性。此外,该方法还采用了降维技术,降低了计算复杂度,使其能够实时应用于实际车辆。
关键设计:在数据采集方面,需要选择合适的传感器和采样频率,以保证数据的质量和完整性。在降维处理方面,需要选择合适的奇异值个数,以在降低计算复杂度的同时,保证预测模型的精度。在预测控制方面,需要选择合适的优化算法和约束条件,以实现侧翻预防的目标。
🖼️ 关键图片

📊 实验亮点
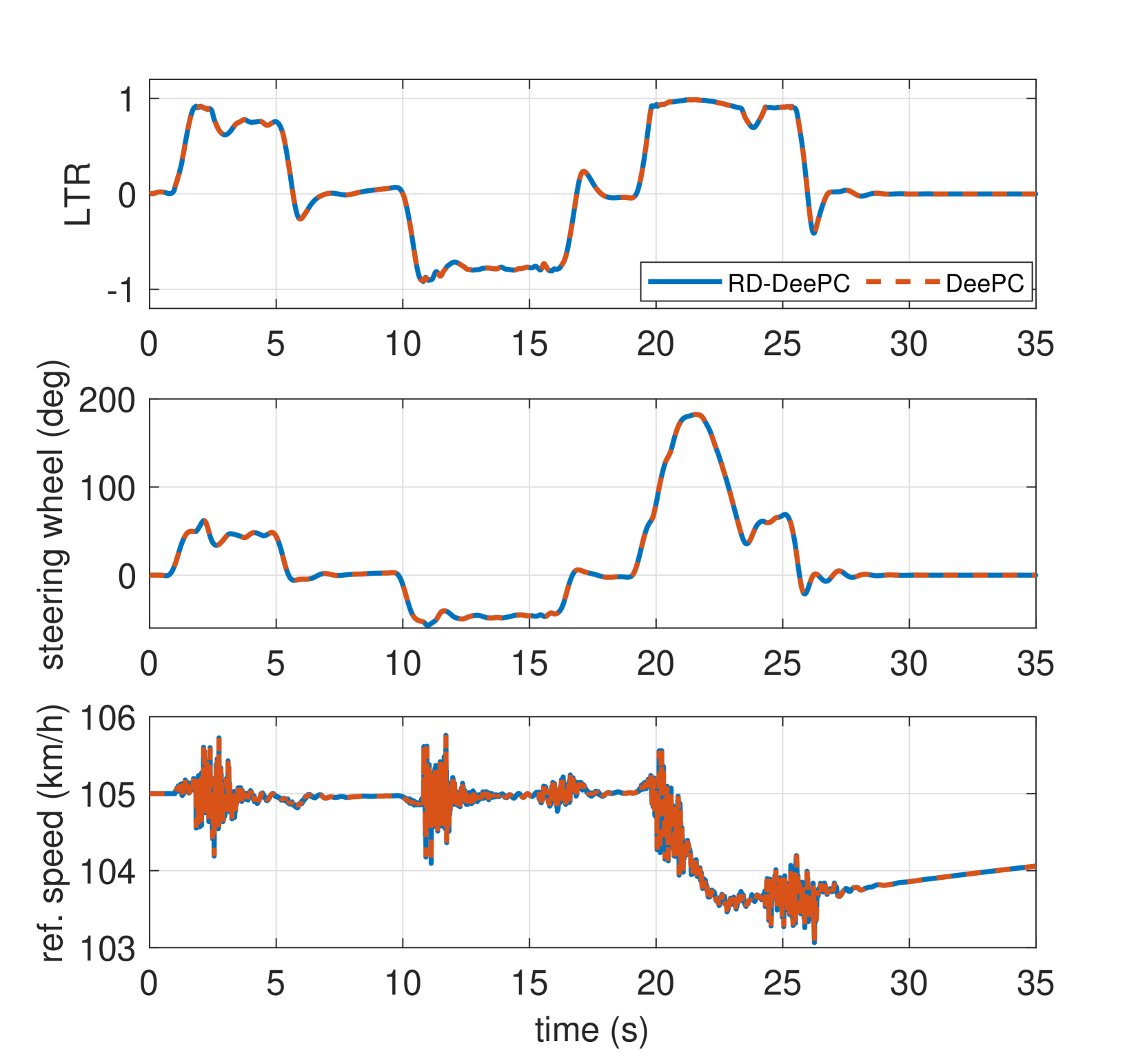
通过CarSim高保真仿真,验证了DeePC在轿车和卡车场景下的有效性。与线性模型预测控制(LMPC)相比,DeePC在防止侧翻的同时,能够更好地保持车辆的机动性。具体而言,DeePC在各种工况下均能有效抑制侧翻,且控制效果优于LMPC,表明其具有更强的鲁棒性和适应性。
🎯 应用场景
该研究成果可应用于各种车辆的侧翻预防系统,提高车辆行驶安全性。例如,可以集成到高级驾驶辅助系统(ADAS)中,在车辆即将发生侧翻时进行干预,防止事故发生。此外,该方法还可以应用于自动驾驶车辆,提高其在复杂环境下的行驶安全性。未来,该方法有望推广到其他车辆安全控制领域,例如防抱死制动系统(ABS)和电子稳定控制系统(ESC)。
📄 摘要(原文)
Vehicle rollovers pose a significant safety risk and account for a disproportionately high number of fatalities in road accidents. This paper addresses the challenge of rollover prevention using Data-EnablEd Predictive Control (DeePC), a data-driven control strategy that directly leverages raw input-output data to maintain vehicle stability without requiring explicit system modeling. To enhance computational efficiency, we employ a reduced-dimension DeePC that utilizes singular value decomposition-based dimension reduction to significantly lower computation complexity without compromising control performance. This optimization enables real-time application in scenarios with high-dimensional data, making the approach more practical for deployment in real-world vehicles. The proposed approach is validated through high-fidelity CarSim simulations in both sedan and utility truck scenarios, demonstrating its versatility and ability to maintain vehicle stability under challenging driving conditions. Comparative results with Linear Model Predictive Control (LMPC) highlight the superior performance of DeePC in preventing rollovers while preserving maneuverability. The findings suggest that DeePC offers a robust and adaptable solution for rollover prevention, capable of handling varying road and vehicle conditions.