Control Barrier Functions for Shared Control and Vehicle Safety
作者: James Dallas, John Talbot, Makoto Suminaka, Michael Thompson, Thomas Lew, Gabor Orosz, John Subosits
分类: eess.SY
发布日期: 2025-03-25
备注: Authors accepted manuscript for 2025 American Control Conference
期刊: 2025 American Control Conference (ACC), 2025, pp. 4203-4210
DOI: 10.23919/ACC63710.2025.11107628
💡 一句话要点
提出基于控制障碍函数的共享控制方法,保障车辆安全并实现安全漂移。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 控制障碍函数 共享控制 车辆安全 漂移控制 汽车动力学
📋 核心要点
- 车辆在极限工况下的安全控制是一个挑战,传统方法难以有效防止车辆进入不可恢复状态。
- 利用控制障碍函数在侧滑角-横摆角速度相位平面上定义安全集,并设计指数控制障碍函数以保障车辆安全。
- 实验结果表明,该方法能够实现安全漂移,并在共享控制下保持车辆状态在安全域内,计算效率高。
📝 摘要(中文)
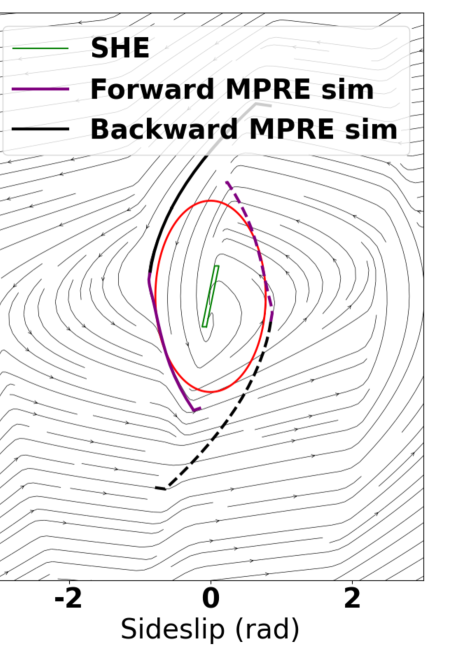
本文提出了一种基于控制障碍函数的共享控制方法,旨在防止车辆进入无法恢复的状态空间。最大相位可恢复椭圆被定义为侧滑角-横摆角速度相位平面上的安全集,车辆状态可以在此范围内维持。然后,在最大相位可恢复椭圆上定义一个指数控制障碍函数以提高安全性。仿真结果表明,该方法能够实现安全漂移,即在不发生旋转的情况下,在操控极限下驾驶。实验车辆在封闭场地中的共享控制漂移验证了结果。结果表明,即使在极端的漂移动作中,这种共享控制公式也能以计算高效的方式将车辆状态维持在安全域内。
🔬 方法详解
问题定义:论文旨在解决车辆在极限工况下,如何通过共享控制防止车辆进入无法恢复的状态,例如发生spin out的问题。现有的控制方法在处理这种非线性、高动态的场景时,往往难以保证车辆的安全性,尤其是在驾驶员进行激进操作时。
核心思路:核心思路是利用控制障碍函数(Control Barrier Function, CBF)来构建一个安全域,并设计控制器,使得车辆的状态始终保持在这个安全域内。具体来说,论文将车辆的侧滑角和横摆角速度作为状态变量,定义了一个最大相位可恢复椭圆作为安全集。通过设计合适的CBF,可以保证车辆的状态不会超出这个安全集,从而避免发生危险。
技术框架:整体框架包含以下几个主要步骤:1) 定义车辆状态空间,选取侧滑角和横摆角速度作为关键状态变量。2) 确定最大相位可恢复椭圆,作为车辆的安全集。3) 设计指数控制障碍函数,该函数能够衡量车辆状态与安全集边界的距离,并提供一个安全裕度。4) 构建共享控制策略,将驾驶员的输入与CBF控制器相结合,在保证驾驶员意图的同时,防止车辆进入不安全区域。
关键创新:关键创新在于将控制障碍函数应用于车辆共享控制,并针对漂移场景设计了特定的安全集(最大相位可恢复椭圆)和指数控制障碍函数。与传统的基于模型预测控制(MPC)等方法相比,CBF方法计算效率更高,更适合实时控制。此外,指数CBF的设计能够提供更强的安全保障。
关键设计:论文中关键的设计包括:1) 最大相位可恢复椭圆的参数选择,需要根据车辆的动力学特性进行调整。2) 指数控制障碍函数的参数选择,需要平衡安全性和控制性能。3) 共享控制策略的设计,需要合理分配驾驶员输入和CBF控制器的权重,以实现平滑的过渡和良好的驾驶体验。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该方法能够有效地防止车辆发生spin out,即使在极端的漂移动作中,也能将车辆状态维持在安全域内。通过与驾驶员的共享控制,实现了安全漂移,验证了该方法在实际应用中的可行性。虽然论文中没有给出具体的性能数据,但实验结果表明该方法具有较高的计算效率,能够满足实时控制的需求。
🎯 应用场景
该研究成果可应用于高级驾驶辅助系统(ADAS)和自动驾驶系统,尤其是在需要处理极限工况的场景下,例如紧急避障、赛道驾驶等。通过共享控制,可以在保证驾驶员操控自由度的同时,防止车辆进入危险状态,提高车辆的安全性。此外,该方法还可以应用于其他类型的车辆,例如无人机、机器人等。
📄 摘要(原文)
This manuscript presents a control barrier function based approach to shared control for preventing a vehicle from entering the part of the state space where it is unrecoverable. The maximal phase recoverable ellipse is presented as a safe set in the sideslip angle--yaw rate phase plane where the vehicle's state can be maintained. An exponential control barrier function is then defined on the maximal phase recoverable ellipse to promote safety. Simulations demonstrate that this approach enables safe drifting, that is, driving at the handling limit without spinning out. Results are then validated for shared control drifting with an experimental vehicle in a closed course. The results show the ability of this shared control formulation to maintain the vehicle's state within a safe domain in a computationally efficient manner, even in extreme drifting maneuvers.