Priority-driven Constraints Softening in Safe MPC for Perturbed Systems
作者: Ying Shuai Quan, Mohammad Jeddi, Francesco Prignoli, Paolo Falcone
分类: eess.SY
发布日期: 2025-03-19
备注: 6 pages, 6 figures, submitted to 2025 CDC conference
💡 一句话要点
提出一种基于优先级驱动的约束软化安全MPC方法,用于解决受扰动系统的安全控制问题。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 安全模型预测控制 约束软化 优先级驱动 扰动系统 自动驾驶
📋 核心要点
- 现有MPC方法在处理受扰动系统时,难以同时保证安全性和实时性,尤其是在存在硬约束的情况下。
- 该论文提出一种基于优先级驱动的约束软化策略,通过在线调整约束的严格程度来应对扰动,保证安全性。
- 仿真结果表明,该方法在自动驾驶场景中能够有效避免碰撞,验证了其在实际应用中的可行性。
📝 摘要(中文)
本文提出了一种安全模型预测控制(SMPC)框架,旨在确保系统在受到外部扰动时仍能满足硬约束。该框架通过在线软化设计者定义的可调整约束子集来实现安全性保证,即使存在扰动。约束软化的选择是基于预先定义的优先级进行的。基于学习的算法设计实现了实时计算,同时保留了原始的安全属性。在自动驾驶应用中获得的仿真结果表明,该方法能够保证避免碰撞的硬约束,即使周围环境存在不可预测的行为。
🔬 方法详解
问题定义:论文旨在解决受外部扰动影响的系统的安全模型预测控制问题。现有方法在处理此类问题时,通常难以在保证安全约束(特别是硬约束)的同时,维持控制器的实时性。扰动的存在可能导致传统MPC无法满足所有约束,从而危及系统安全。
核心思路:论文的核心思路是引入约束软化的概念,允许在线调整部分约束的严格程度,以应对扰动的影响。通过预先为每个可调整约束分配优先级,控制器可以根据当前状态和扰动情况,优先软化优先级较低的约束,从而在保证关键安全约束的前提下,维持系统的可行性和性能。
技术框架:该SMPC框架包含以下主要模块:1) 状态估计器:用于估计系统的当前状态,包括可能受扰动影响的状态变量。2) 约束优先级分配器:根据设计者的先验知识,为每个可调整约束分配优先级。3) 约束软化选择器:基于当前状态和扰动估计,选择需要软化的约束子集,并确定软化程度。4) 模型预测控制器:基于软化后的约束集,求解优化问题,得到控制输入。5) 学习模块:利用学习算法,例如神经网络,来预测扰动或优化约束软化策略,以提高控制器的性能和实时性。
关键创新:该方法最重要的创新点在于优先级驱动的约束软化策略。与传统的等同对待所有约束的软化方法不同,该方法允许设计者根据约束的重要性进行区分,从而在保证关键安全约束的前提下,更有效地利用控制资源。此外,结合学习算法可以进一步提高控制器的自适应性和实时性。
关键设计:约束的优先级分配是关键设计之一,需要根据具体的应用场景和安全需求进行仔细考虑。软化程度的确定可以通过优化算法或学习算法来实现。损失函数的设计需要平衡安全性和性能,例如,可以采用惩罚函数来约束软化程度,同时优化控制器的跟踪性能。
🖼️ 关键图片
📊 实验亮点
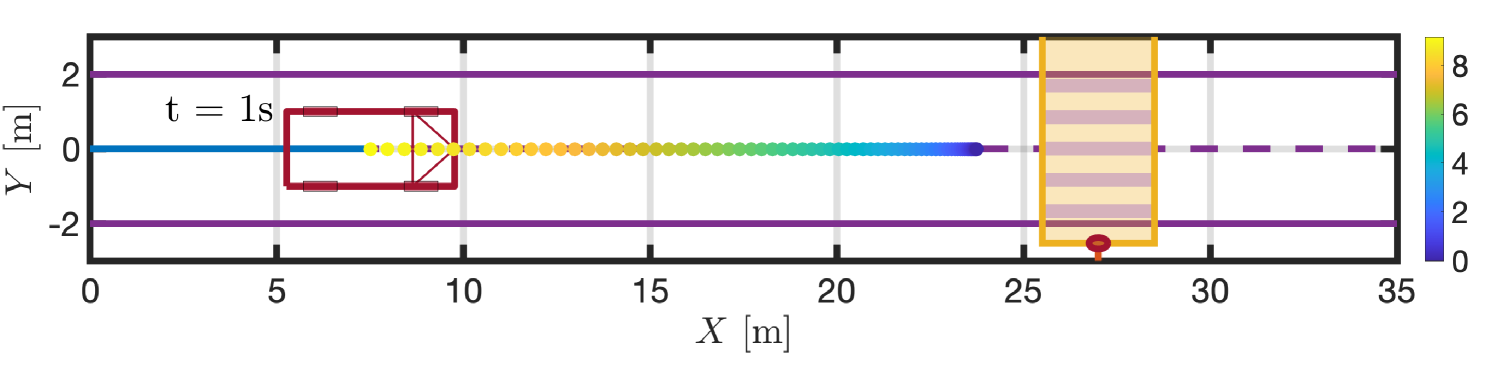
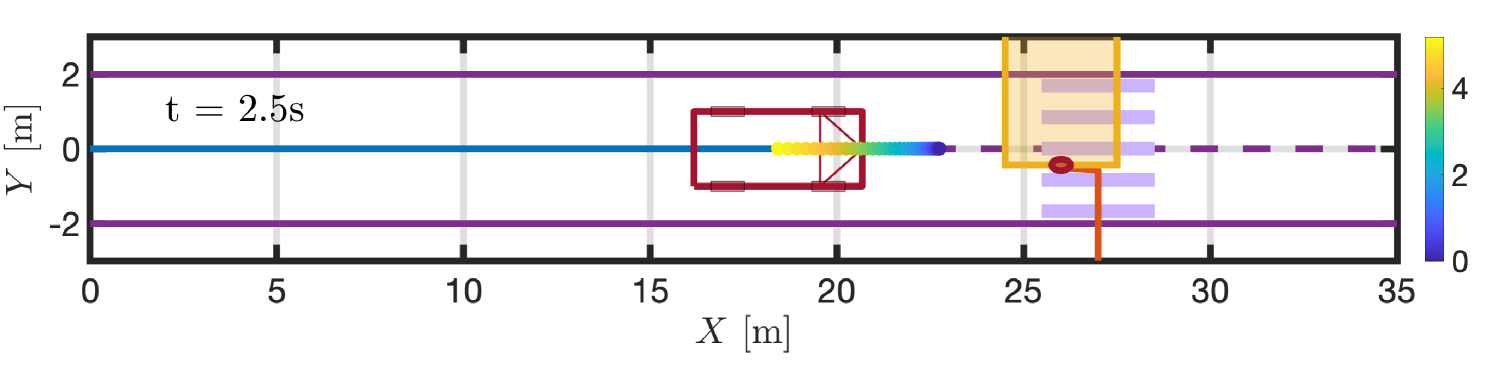
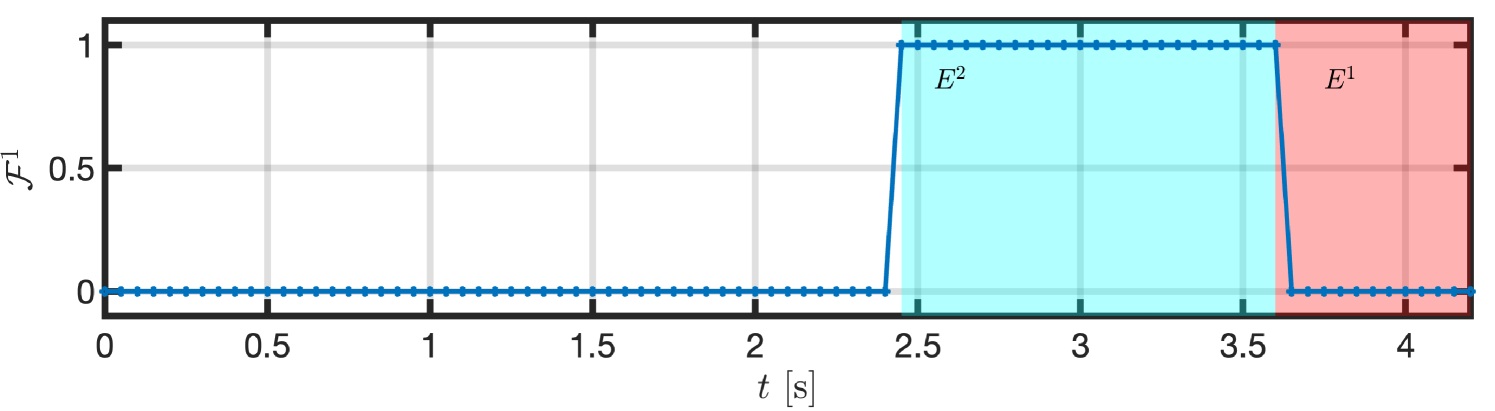
仿真结果表明,该方法在自动驾驶场景中能够有效避免碰撞,即使周围环境存在不可预测的行为。具体来说,在存在外部扰动的情况下,该方法能够保证车辆与障碍物之间的最小距离始终大于安全阈值,从而避免碰撞的发生。此外,该方法还能够维持车辆的跟踪性能,使其能够按照预定的轨迹行驶。
🎯 应用场景
该研究成果可广泛应用于需要安全保障的控制系统中,例如自动驾驶、机器人导航、航空航天等领域。在自动驾驶中,该方法可以用于避免车辆碰撞,保证乘客安全。在机器人导航中,可以用于避免机器人与障碍物发生碰撞。在航空航天领域,可以用于保证飞行器的安全飞行。
📄 摘要(原文)
This paper presents a safe model predictive control (SMPC) framework designed to ensure the satisfaction of hard constraints for systems perturbed by an external disturbance. Such safety guarantees are ensured, despite the disturbance, by online softening a subset of adjustable constraints defined by the designer. The selection of the constraints to be softened is made online based on a predefined priority assigned to each adjustable constraint. The design of a learning-based algorithm enables real-time computation while preserving the original safety properties. Simulations results, obtained from an automated driving application, show that the proposed approach provides guarantees of collision-avoidance hard constraints despite the unpredicted behaviors of the surrounding environment.