Intrinsic Successive Convexification: Trajectory Optimization on Smooth Manifolds
作者: Spencer Kraisler, Mehran Mesbahi, Behcet Acikmese
分类: math.OC, eess.SY
发布日期: 2025-03-17
💡 一句话要点
提出iSCvx方法,用于流形上的轨迹优化,解决传统方法冗余和依赖状态空间表示的问题。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 轨迹优化 流形优化 连续凸化 航天器姿态控制 最优控制
📋 核心要点
- 传统轨迹优化方法在处理流形约束时存在冗余操作,且过度依赖状态空间表示,限制了效率和泛化性。
- iSCvx方法通过内在连续凸化,直接在流形上进行优化,避免了冗余计算,并减少了对状态空间表示的依赖。
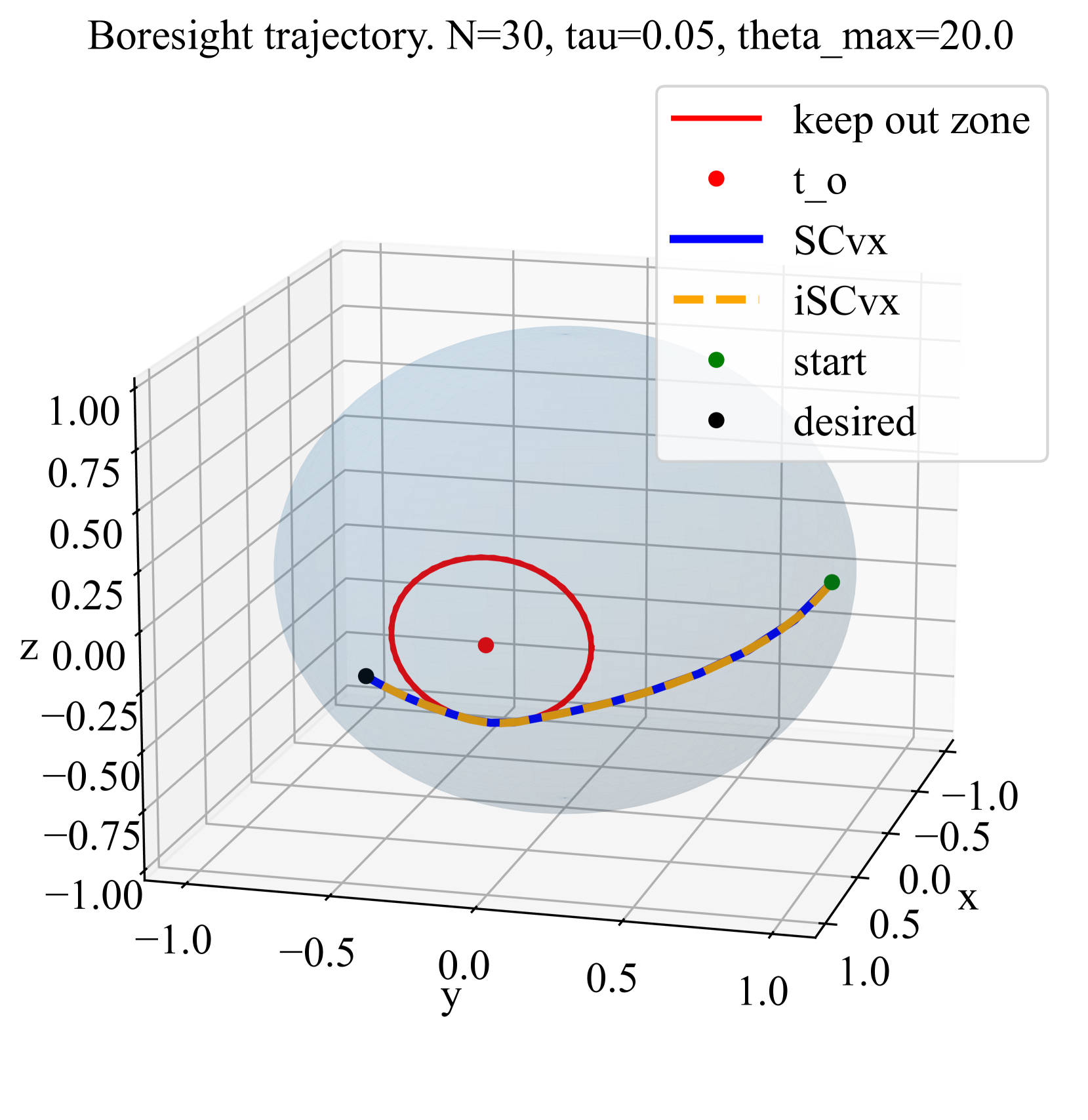
- 通过航天器姿态轨迹优化实验,验证了iSCvx方法在处理非凸约束问题上的有效性。
📝 摘要(中文)
本文提出了一种用于光滑流形上轨迹优化的内在连续凸化方法(iSCvx),旨在解决动态模型中隐式流形约束的处理问题。传统方法通常将动态模型作为约束强制执行,但本文指出这种方法会导致显著的冗余操作,并且严重依赖于状态空间表示。iSCvx方法被应用于一个代表性的例子,即航天器在非凸约束下的姿态轨迹优化。
🔬 方法详解
问题定义:论文旨在解决光滑流形上轨迹优化问题,特别是如何高效处理动态模型中的隐式流形约束。传统方法将动态模型作为约束条件,导致计算冗余,并且性能严重依赖于状态空间表示的选择。这种依赖性限制了算法的通用性和效率。
核心思路:论文的核心思路是提出一种内在连续凸化方法(iSCvx),该方法直接在流形上进行优化,避免了将流形约束嵌入到状态空间中。通过在流形上进行凸近似,可以在每次迭代中有效地找到局部最优解,而无需显式地处理复杂的非线性约束。
技术框架:iSCvx方法包含以下主要阶段:1) 定义流形上的动态模型;2) 在当前轨迹附近对动态模型进行凸近似;3) 构建凸优化问题,求解新的轨迹;4) 迭代更新轨迹,直到收敛。该框架避免了在状态空间中进行复杂的坐标变换和约束处理。
关键创新:最重要的技术创新点在于“内在”凸化,即直接在流形上进行凸近似,而不是在状态空间中。这种方法避免了传统方法中由于坐标系选择带来的冗余计算和性能损失。与现有方法相比,iSCvx方法更加简洁、高效,并且对状态空间表示的依赖性更低。
关键设计:iSCvx方法的关键设计包括:1) 如何在流形上定义合适的凸近似;2) 如何选择合适的优化算法来求解凸优化问题;3) 如何保证迭代过程的收敛性。具体的凸近似方法和优化算法的选择取决于具体的流形和动态模型。
🖼️ 关键图片
📊 实验亮点
论文通过航天器姿态轨迹优化实验验证了iSCvx方法的有效性。实验结果表明,iSCvx方法能够有效地处理非凸约束,并获得高质量的轨迹。虽然论文中没有给出具体的性能数据和对比基线,但实验结果表明iSCvx方法在处理流形约束问题上具有优势。
🎯 应用场景
该研究成果可应用于航天器姿态控制、机器人运动规划、无人机轨迹优化等领域。通过在流形上直接进行优化,可以提高控制系统的效率和精度,并降低对状态空间表示的依赖性。未来,该方法有望推广到更复杂的流形和动态系统,为相关领域提供更强大的优化工具。
📄 摘要(原文)
A fundamental issue at the core of trajectory optimization on smooth manifolds is handling the implicit manifold constraint within the dynamics. The conventional approach is to enforce the dynamic model as a constraint. However, we show this approach leads to significantly redundant operations, as well as being heavily dependent on the state space representation. Specifically, we propose an intrinsic successive convexification methodology for optimal control on smooth manifolds. This so-called iSCvx is then applied to a representative example involving attitude trajectory optimization for a spacecraft subject to non-convex constraints.