Low-pass sampling in Model Predictive Path Integral Control
作者: Piotr Kicki
分类: eess.SY, cs.RO
发布日期: 2025-03-13 (更新: 2025-09-23)
💡 一句话要点
提出低通滤波MPPI控制,解决控制轨迹高频噪声问题,提升控制平滑性和采样效率。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 模型预测控制 路径积分控制 低通滤波 机器人控制 自动驾驶 采样控制 频率域分析
📋 核心要点
- 传统MPPI控制采样轨迹存在高频噪声,导致执行器损耗和探索效率降低。
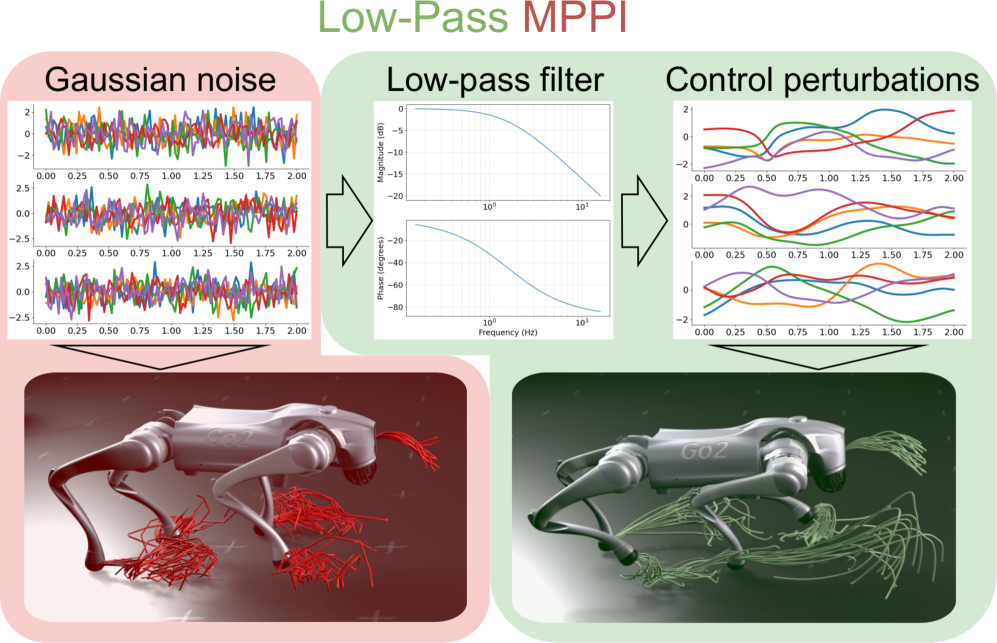
- LP-MPPI通过在采样过程中集成低通滤波,直接控制采样轨迹的频率成分。
- 实验表明,LP-MPPI在多种场景下优于现有MPPI方法,显著提升性能并降低控制抖动。
📝 摘要(中文)
模型预测路径积分(MPPI)控制是一种广泛使用的基于采样的实时控制方法,它在处理任意动力学和成本函数方面具有灵活性。然而,原始MPPI存在采样控制轨迹中高频噪声的问题,导致执行器磨损和低效探索。本文提出了低通模型预测路径积分控制(LP-MPPI),它将低通滤波集成到采样过程中,以消除有害的高频分量,并提高控制轨迹探索的有效性。与现有方法不同,LP-MPPI提供了对采样轨迹频谱的直接和可解释的控制,从而提高了采样效率和控制平滑性。通过在Gymnasium环境、模拟四足机器人运动和真实F1TENTH自动驾驶赛车中的大量评估,我们证明LP-MPPI始终优于最先进的MPPI变体,在降低控制信号抖动的同时,实现了显著的性能提升。
🔬 方法详解
问题定义:传统模型预测路径积分(MPPI)控制在实时控制中应用广泛,但其采样得到的控制轨迹包含大量高频噪声。这些高频分量会导致执行器不必要的磨损,并降低控制探索的效率,影响控制系统的整体性能和寿命。因此,如何降低MPPI控制中的高频噪声,提高控制轨迹的平滑性,是一个亟待解决的问题。
核心思路:LP-MPPI的核心思路是在MPPI的采样过程中引入低通滤波。通过对采样得到的控制轨迹进行低通滤波,可以有效地滤除高频噪声,从而得到更加平滑的控制信号。这种方法能够直接控制采样轨迹的频率成分,避免了传统方法中难以解释和控制的噪声问题。
技术框架:LP-MPPI的整体框架与传统的MPPI类似,主要包括以下几个步骤:1)对控制输入进行采样;2)使用动力学模型预测系统状态;3)计算每个轨迹的成本函数;4)根据成本函数对轨迹进行加权;5)将加权后的轨迹作为控制输入。LP-MPPI的关键区别在于,在采样得到控制输入后,会对其进行低通滤波,然后再进行后续的步骤。
关键创新:LP-MPPI最重要的创新点在于将低通滤波直接集成到MPPI的采样过程中。与以往尝试通过后处理或其他间接方式降低噪声的方法不同,LP-MPPI能够直接且可解释地控制采样轨迹的频率成分。这种直接控制使得LP-MPPI能够更有效地消除高频噪声,并提高控制轨迹的平滑性。
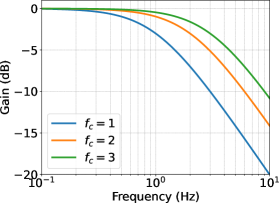
关键设计:LP-MPPI的关键设计在于低通滤波器的选择和参数设置。论文中可能探讨了不同类型的低通滤波器(例如巴特沃斯滤波器、切比雪夫滤波器等)对控制性能的影响。此外,截止频率的选择也是一个重要的参数,它决定了哪些频率的信号会被滤除。合适的截止频率需要在控制性能和平滑性之间进行权衡。具体的滤波器类型和参数设置可能需要根据具体的应用场景进行调整。
🖼️ 关键图片

📊 实验亮点
实验结果表明,LP-MPPI在Gymnasium环境、模拟四足机器人运动和真实F1TENTH自动驾驶赛车中均优于传统的MPPI方法。在F1TENTH自动驾驶赛车实验中,LP-MPPI能够显著降低控制信号的抖动,并提高赛车的行驶速度和稳定性。具体性能提升数据(例如圈速提升百分比、抖动降低幅度等)需要在论文中查找。
🎯 应用场景
LP-MPPI具有广泛的应用前景,包括机器人控制、自动驾驶、无人机控制等领域。通过降低控制信号的噪声,LP-MPPI可以延长执行器的寿命,提高控制系统的稳定性和精度。此外,LP-MPPI还可以应用于需要平滑控制轨迹的场景,例如医疗机器人、精密仪器控制等。该研究的成果有助于推动这些领域的发展,并提高相关产品的性能和可靠性。
📄 摘要(原文)
Model Predictive Path Integral (MPPI) control is a widely used sampling-based approach for real-time control, offering flexibility in handling arbitrary dynamics and cost functions. However, the original MPPI suffers from high-frequency noise in the sampled control trajectories, leading to actuator wear and inefficient exploration. In this work, we introduce Low-Pass Model Predictive Path Integral Control (LP-MPPI), which integrates low-pass filtering into the sampling process to eliminate detrimental high-frequency components and improve the effectiveness of the control trajectories exploration. Unlike prior approaches, LP-MPPI provides direct and interpretable control over the frequency spectrum of sampled trajectories, enhancing sampling efficiency and control smoothness. Through extensive evaluations in Gymnasium environments, simulated quadruped locomotion, and real-world F1TENTH autonomous racing, we demonstrate that LP-MPPI consistently outperforms state-of-the-art MPPI variants, achieving significant performance improvements while reducing control signal chattering.