Reach-Avoid-Stay-Collision-Avoidance Negotiation Framework for Multi-Agent Systems via Spatiotemporal Tubes
作者: Mohd. Faizuddin Faruqui, Ratnangshu Das, Ravi Kumar L, Pushpak Jagtap
分类: eess.SY
发布日期: 2025-03-13
备注: Accepted in ECC 2025
💡 一句话要点
提出基于时空管道的多智能体协商框架,解决规定时间内到达-避障-停留任务的冲突避免问题
🎯 匹配领域: 支柱八:物理动画 (Physics-based Animation)
关键词: 多智能体系统 时空管道 协商机制 到达-避障-停留 分布式控制
📋 核心要点
- 现有方法难以在未知动力学和扰动下,保证多智能体系统在规定时间内完成到达、避障和停留任务。
- 该论文提出基于时空管道的协商机制,为每个智能体生成满足RAS规范的无碰撞路径,实现分布式控制。
- 通过多智能体机器人和无人机导航仿真,验证了该框架在规定时间RAS任务和避碰方面的有效性。
📝 摘要(中文)
本研究提出了一种基于多智能体协商的框架,用于在执行规定时间的到达-避障-停留(RAS)任务时,获得无碰撞路径,适用于具有未知动力学和有界扰动的智能体。通过采用时空管道生成时变状态约束,我们使用合成控制器确保所有智能体都遵守RAS规范。为了防止智能体间的碰撞,提出了一种协商机制,成功的协商会为每个智能体生成满足所需任务的时空管道。这种方法为每个智能体提供了一种完全分布式、无近似的控制律。通过多智能体机器人导航和无人机导航任务的仿真验证了该机制的有效性,这些任务涉及规定时间的RAS规范和避碰。
🔬 方法详解
问题定义:论文旨在解决多智能体系统在具有未知动力学和有界扰动的情况下,如何安全高效地完成规定时间的到达-避障-停留(Reach-Avoid-Stay, RAS)任务。现有方法在处理此类问题时,往往难以保证所有智能体在规定时间内完成任务,同时避免碰撞,并且缺乏对未知动力学和扰动的鲁棒性。
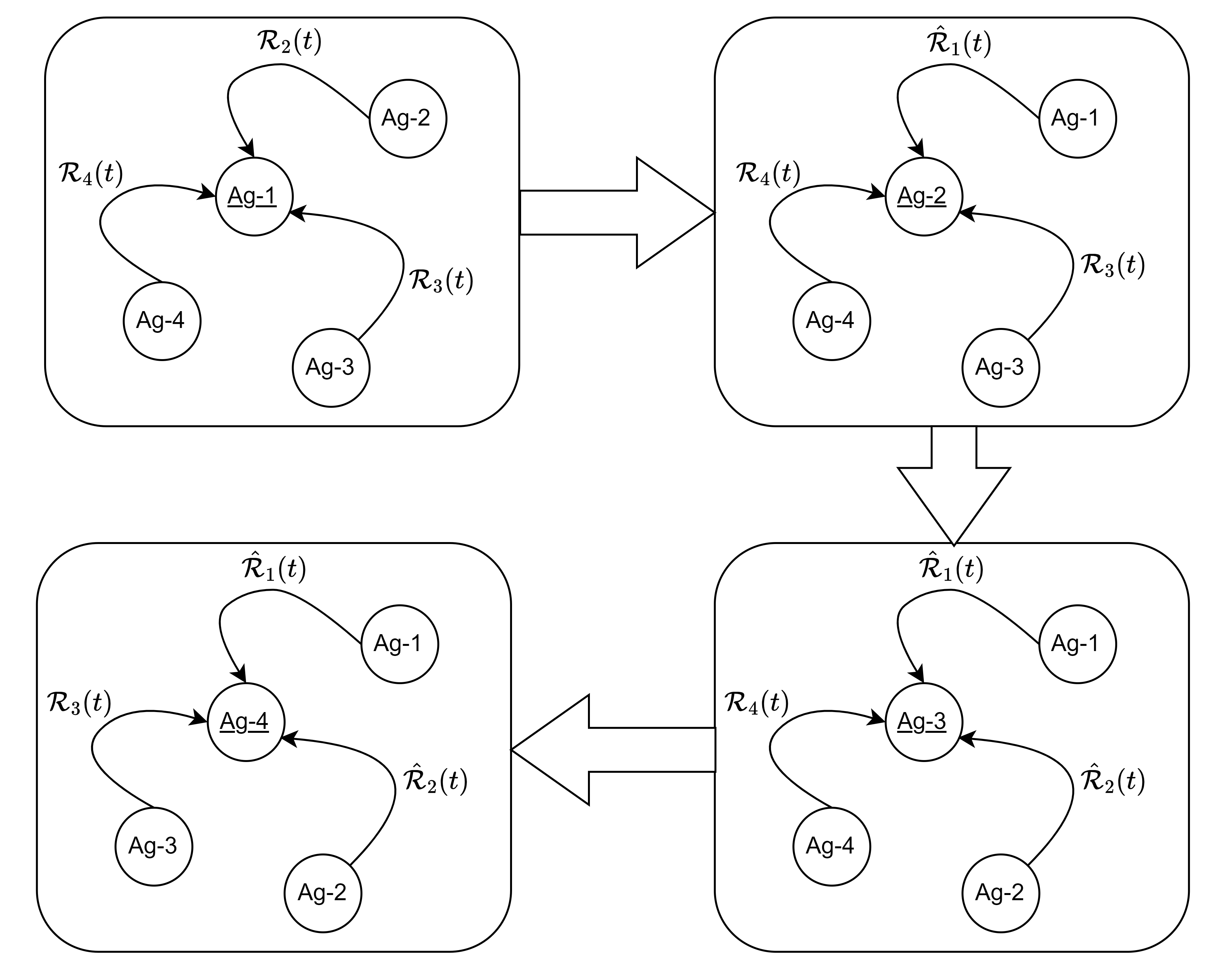
核心思路:论文的核心思路是利用时空管道(Spatiotemporal Tubes)来约束智能体的运动轨迹,并设计一种基于协商的机制来解决智能体之间的冲突。每个智能体都试图生成满足RAS规范的时空管道,如果管道之间存在重叠,则通过协商来调整管道,直到所有智能体都获得无碰撞的路径。这种方法将复杂的全局规划问题分解为多个局部协商问题,从而实现分布式控制。
技术框架:该框架主要包含以下几个阶段:1) 时空管道生成:每个智能体根据自身的RAS任务生成初始的时空管道。2) 冲突检测:检测智能体之间的时空管道是否存在重叠,即潜在的碰撞风险。3) 协商机制:如果检测到冲突,智能体之间进行协商,调整各自的时空管道,例如改变速度或路径。协商过程可能需要多次迭代,直到所有冲突都得到解决。4) 控制器设计:为每个智能体设计控制器,使其能够沿着协商后的时空管道安全地运动,并满足RAS规范。
关键创新:该论文的关键创新在于将时空管道与协商机制相结合,实现了一种完全分布式的多智能体控制框架。与传统的集中式规划方法相比,该方法具有更好的可扩展性和鲁棒性。此外,该方法不需要精确的动力学模型,只需要知道扰动的上界,这使得它更适用于实际应用。
关键设计:论文中,时空管道的生成方式和协商机制的设计是关键。时空管道的形状和大小直接影响智能体的运动自由度和避碰能力。协商机制需要保证公平性和效率,避免出现死锁或无限循环的情况。具体的参数设置,例如协商的步长和迭代次数,需要根据具体的应用场景进行调整。
🖼️ 关键图片

📊 实验亮点
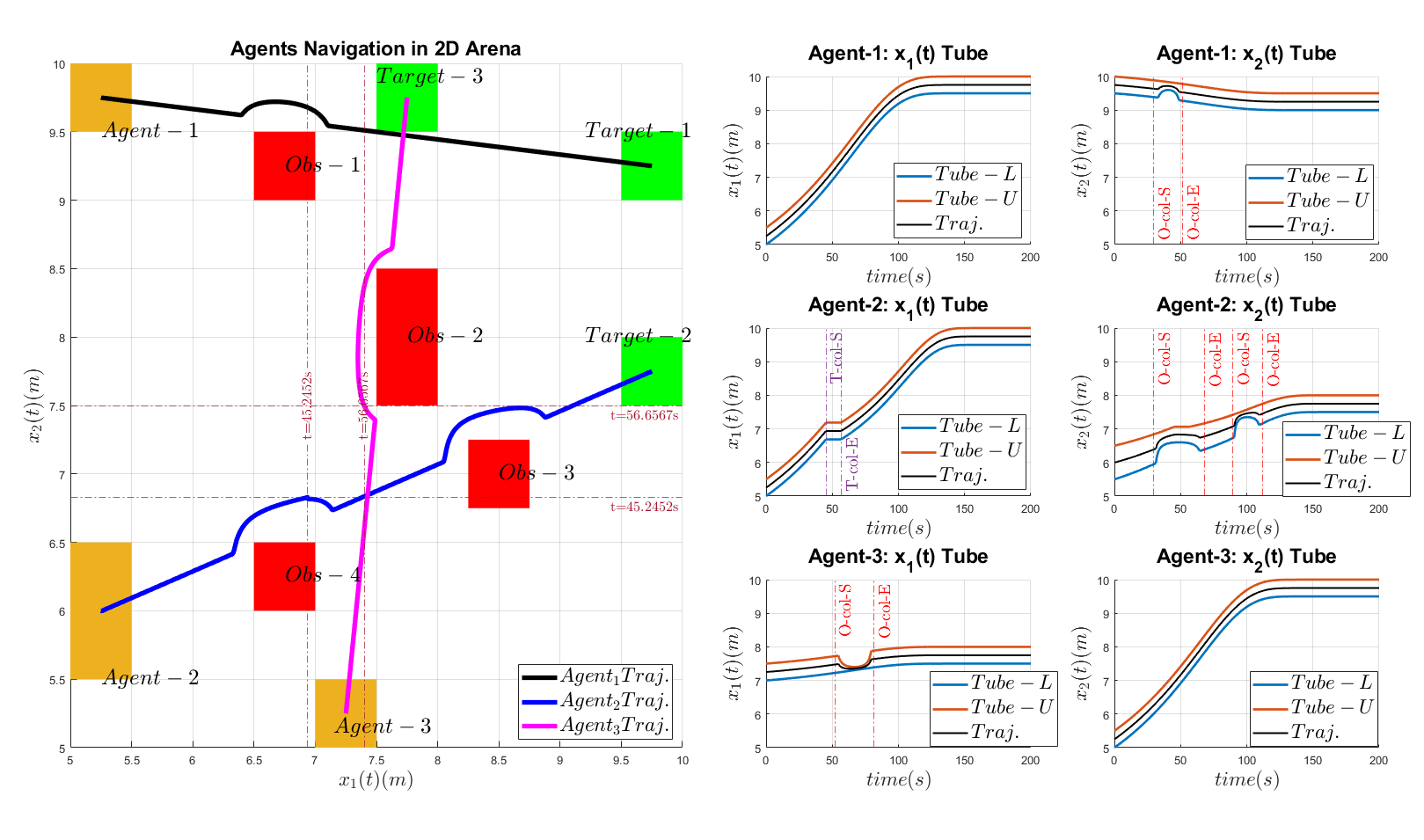
通过仿真实验,验证了该框架在多智能体机器人导航和无人机导航任务中的有效性。实验结果表明,该框架能够保证所有智能体在规定时间内完成RAS任务,并有效避免碰撞。虽然论文中没有给出具体的性能数据和对比基线,但仿真结果直观地展示了该方法的实用性。
🎯 应用场景
该研究成果可应用于多机器人协同搬运、无人机编队飞行、自动驾驶车辆的交通管理等领域。通过该框架,可以实现多个智能体在复杂环境中安全、高效地完成任务,具有重要的实际应用价值和广阔的发展前景。未来的研究可以进一步探索如何处理更复杂的环境和任务,例如动态障碍物和非合作智能体。
📄 摘要(原文)
This study presents a multi-agent negotiation-based framework to obtain collision-free paths while performing prescribed-time reach-avoid-stay (RAS) tasks for agents with unknown dynamics and bounded disturbance. By employing spatiotemporal tubes to generate time-varying state constraints, we ensure that all agents adhere to RAS specifications using synthesized controllers. To prevent inter-agent collisions, a negotiation mechanism is proposed where successful negotiations result in spatiotemporal tubes for each agent fulfilling desired tasks. This approach results in a completely distributed, approximation-free control law for each agent. The effectiveness of this mechanism was validated through simulations of multi-agent robot navigation and drone navigation tasks involving prescribed-time RAS specifications and collision avoidance.