AttentionSwarm: Reinforcement Learning with Attention Control Barier Function for Crazyflie Drones in Dynamic Environments
作者: Grik Tadevosyan, Valerii Serpiva, Aleksey Fedoseev, Roohan Ahmed Khan, Demetros Aschu, Faryal Batool, Nickolay Efanov, Artem Mikhaylov, Dzmitry Tsetserukou
分类: eess.SY, cs.RO
发布日期: 2025-03-10 (更新: 2025-10-22)
备注: 6 pages, 6 figures
💡 一句话要点
提出AttentionSwarm,用于动态环境中无人机集群安全强化学习
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 无人机集群 强化学习 注意力机制 控制障碍函数 动态环境 安全控制 轨迹优化
📋 核心要点
- 现有集群控制方法难以在动态环境中保证安全性和效率,尤其是在高速运动和复杂障碍物场景下。
- AttentionSwarm通过注意力机制动态调整控制障碍函数,使无人机集群能够实时感知并规避关键障碍物。
- 实验表明,AttentionSwarm在动态竞速环境中实现了95-100%的无碰撞导航率,验证了其有效性和鲁棒性。
📝 摘要(中文)
本文介绍AttentionSwarm,这是一个新的基准,旨在评估动态无人机竞速场景中安全高效的集群控制。核心在于基于注意力模型控制障碍函数(CBF)框架,该框架将注意力机制与安全关键控制理论相结合,以实现实时避障和轨迹优化。该框架使用注意力权重动态地优先考虑集群附近的关键障碍物和智能体,同时CBF通过强制执行无碰撞约束来正式保证安全。AttentionSwarm算法使用Crazyflie 2.1微型四旋翼无人机集群进行开发和评估,并在室内使用Vicon运动捕捉系统进行测试,以确保精确定位和控制。实验结果表明,我们的系统在动态多智能体无人机竞速环境中实现了95-100%的无碰撞导航率,突显了其在实际场景中的有效性和鲁棒性。这项工作为物流、检查和竞赛中安全、高速的多机器人应用提供了有希望的基础。
🔬 方法详解
问题定义:论文旨在解决动态环境中无人机集群的安全高效控制问题。现有方法在处理高速运动和复杂障碍物时,难以保证集群的安全性和导航效率,容易发生碰撞,并且难以实时优化轨迹。
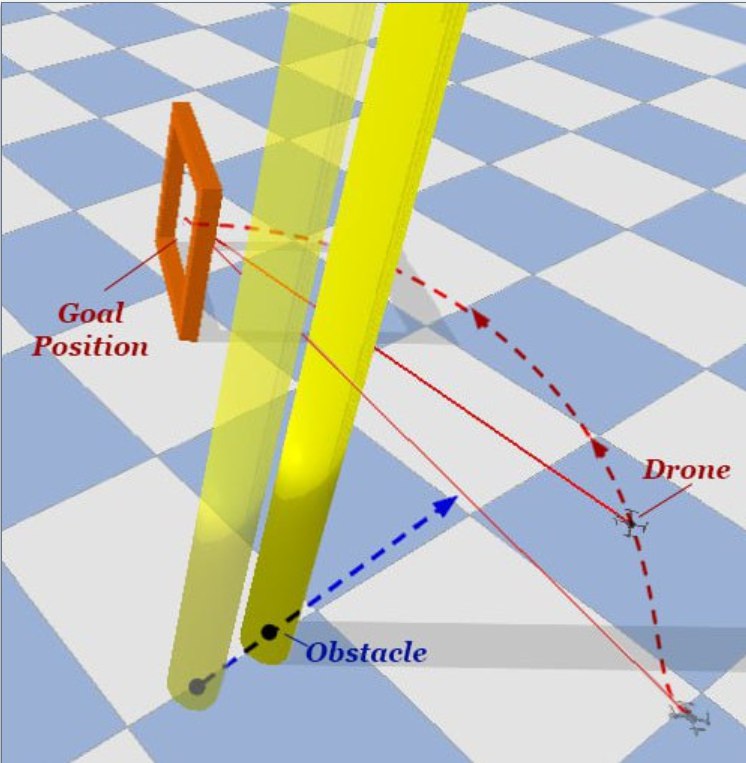
核心思路:论文的核心思路是将注意力机制与控制障碍函数(CBF)相结合。通过注意力机制,无人机可以动态地识别和优先考虑周围环境中的关键障碍物和其它智能体,从而更有效地进行避障。CBF则提供了一种形式化的安全保证,确保无人机在控制过程中始终满足无碰撞约束。
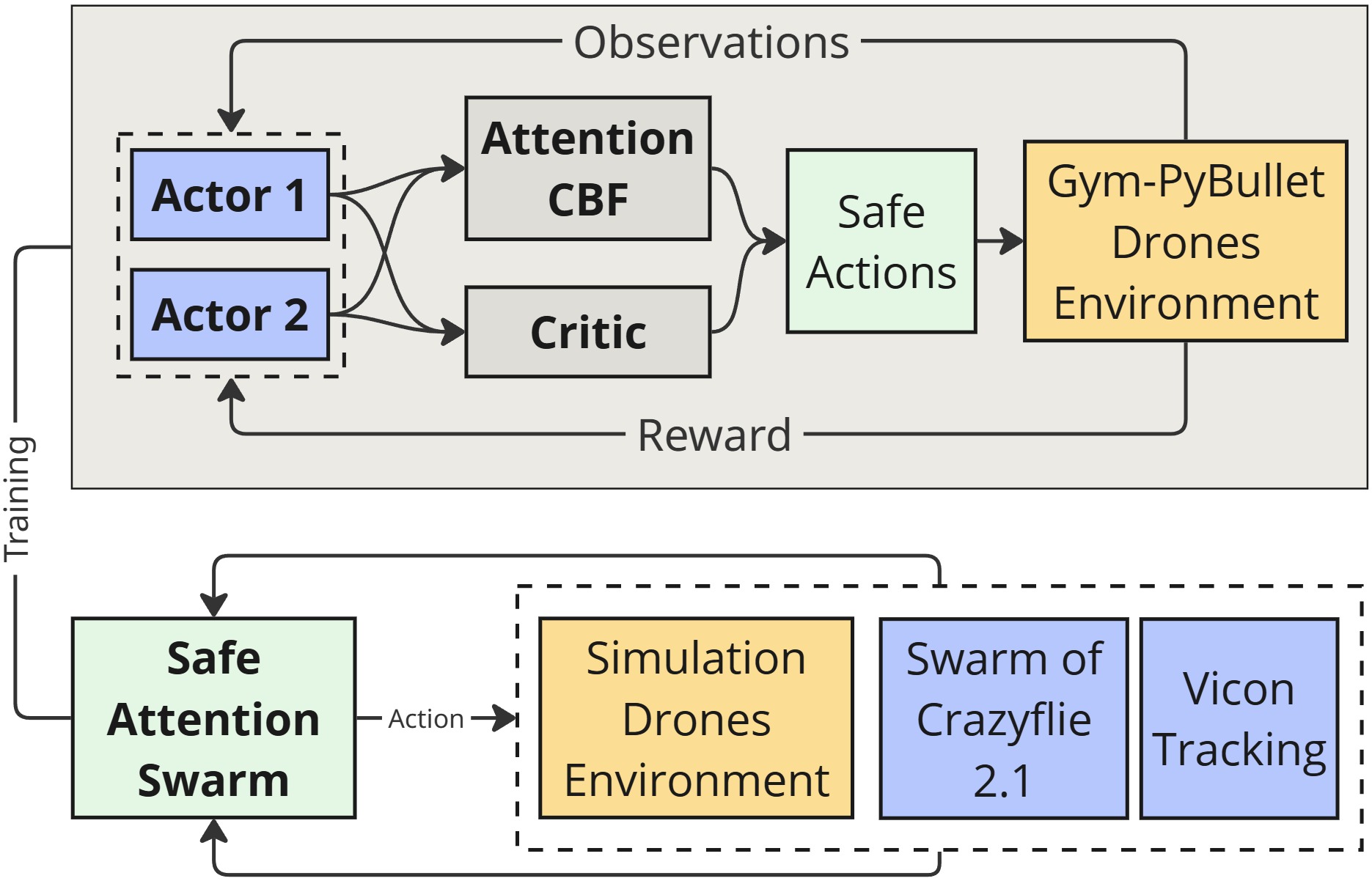
技术框架:AttentionSwarm框架主要包含以下几个模块:1) 感知模块:利用Vicon运动捕捉系统获取无人机和障碍物的精确位置信息。2) 注意力模型:根据无人机与障碍物之间的距离、速度等因素,计算每个障碍物的注意力权重。3) 控制障碍函数(CBF):基于注意力权重,构建CBF,确保无人机在控制过程中满足无碰撞约束。4) 轨迹优化模块:根据CBF约束,优化无人机的轨迹,实现安全高效的导航。
关键创新:最重要的技术创新点在于将注意力机制引入到控制障碍函数中。传统的CBF方法通常平等地对待所有障碍物,而AttentionSwarm可以根据障碍物的重要性动态调整CBF的约束强度,从而更有效地利用控制资源,提高导航效率。
关键设计:注意力模型的设计至关重要,它需要能够准确地评估每个障碍物对无人机安全的影响。论文中可能使用了某种形式的神经网络或手工设计的规则来计算注意力权重。CBF的设计也需要考虑注意力权重的影响,确保约束强度能够根据障碍物的重要性进行调整。具体的损失函数可能包含轨迹平滑性、避障安全性和目标导向性等多个方面。
🖼️ 关键图片

📊 实验亮点
实验结果表明,AttentionSwarm在动态多智能体无人机竞速环境中实现了95-100%的无碰撞导航率。这一结果显著优于传统的集群控制方法,验证了AttentionSwarm在复杂动态环境下的有效性和鲁棒性。此外,该系统在Crazyflie 2.1微型四旋翼无人机上进行了实际测试,证明了其在真实硬件平台上的可行性。
🎯 应用场景
AttentionSwarm技术可应用于物流、检查、搜救和竞技等领域。在物流领域,可实现无人机集群的安全高效配送;在检查领域,可用于复杂环境下的设备巡检;在搜救领域,可用于快速搜索和定位幸存者;在竞技领域,可用于无人机竞速比赛,提升比赛的观赏性和安全性。该研究为多机器人系统的安全控制提供了新的思路,具有重要的实际应用价值和广阔的发展前景。
📄 摘要(原文)
We introduce AttentionSwarm, a novel benchmark designed to evaluate safe and efficient swarm control in a dynamic drone racing scenario. Central to our approach is the Attention Model-Based Control Barrier Function (CBF) framework, which integrates attention mechanisms with safety-critical control theory to enable real-time collision avoidance and trajectory optimization. This framework dynamically prioritizes critical obstacles and agents in the swarm's vicinity using attention weights, while CBFs formally guarantee safety by enforcing collision-free constraints. The AttentionSwarm algorithm was developed and evaluated using a swarm of Crazyflie 2.1 micro quadrotors, which were tested indoors with the Vicon motion capture system to ensure precise localization and control. Experimental results show that our system achieves a 95-100% collision-free navigation rate in a dynamic multi-agent drone racing environment, underscoring its effectiveness and robustness in real-world scenarios. This work offers a promising foundation for safe, high-speed multi-robot applications in logistics, inspection, and racing.