Trajectory Planning with Signal Temporal Logic Costs using Deterministic Path Integral Optimization
作者: Patrick Halder, Hannes Homburger, Lothar Kiltz, Johannes Reuter, Matthias Althoff
分类: eess.SY, cs.RO
发布日期: 2025-03-03
备注: 6+2 pages, 3 figures, P. Halder and H. Homburger contributed equally to the paper, accepted to the 2025 IEEE International Conference on Robotics & Automation (ICRA25)
💡 一句话要点
提出基于确定性路径积分优化的信号时序逻辑约束轨迹规划方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱八:物理动画 (Physics-based Animation)
关键词: 轨迹规划 信号时序逻辑 最优控制 路径积分控制 模型预测控制 机器人 运动规划
📋 核心要点
- 传统优化方法在处理复杂STL规范和不可微项时效率低,平滑和近似技术虽可缓解,但改变了原问题。
- 该论文提出一种基于模型预测路径积分控制的采样方法,用于解决带有STL代价函数的最优控制问题。
- 实验结果表明,该方法能有效解决带有STL代价函数的最优控制问题,并在基准测试中表现优异。
📝 摘要(中文)
动态系统的行为描述极具挑战。信号时序逻辑(STL)因其在形式化可理解、模块化和通用的时空规范方面的适用性而被频繁使用。由于规范的复杂性以及可能出现的不可微项,传统的优化方法在解决基于STL的问题时效率低下。平滑和近似技术可以缓解这些问题,但需要改变优化问题。本文提出了一种基于模型预测路径积分控制的采样方法,以解决具有STL代价函数的最优控制问题。我们在基准运动规划问题上验证了该方法的有效性,并将其性能与最先进的方法进行了比较。结果表明,我们的方法能够有效地解决具有STL代价函数的最优控制问题。
🔬 方法详解
问题定义:论文旨在解决动态系统在满足复杂时空约束(通过信号时序逻辑STL表达)下的最优轨迹规划问题。现有方法,如传统优化方法,在处理复杂的STL规范时,由于计算复杂度高和STL表达式中可能存在的不可微项,效率低下。此外,为了解决这些问题而采用的平滑和近似技术,往往会改变原始的优化问题,导致次优解。
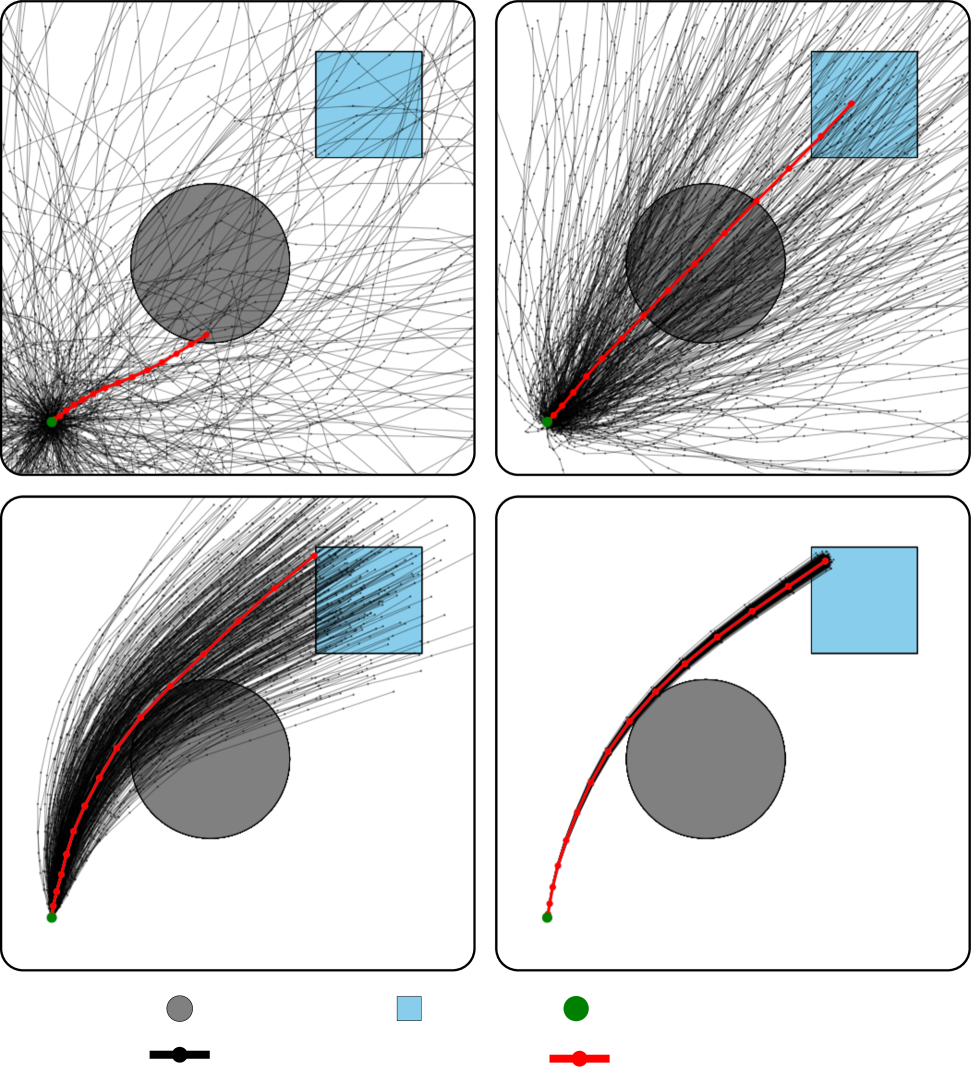
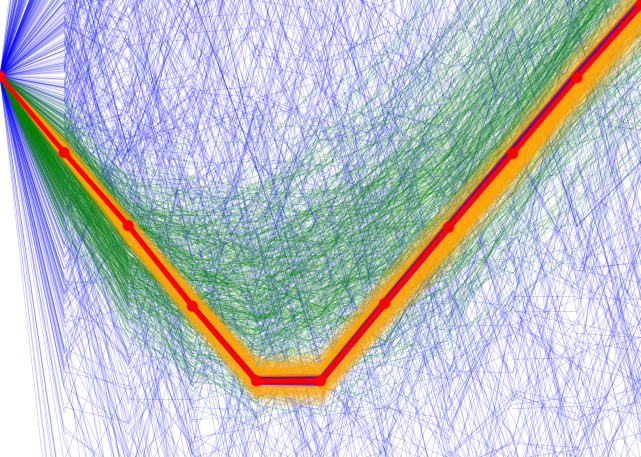
核心思路:该论文的核心思路是利用确定性路径积分控制(Deterministic Path Integral Control, DPI)的采样特性,结合模型预测控制(Model Predictive Control, MPC)框架,来高效地解决带有STL代价函数的最优控制问题。DPI通过采样生成候选轨迹,并根据代价函数进行加权,从而避免了直接求解复杂的优化问题。
技术框架:该方法的技术框架主要包含以下几个阶段:1) 使用STL公式描述期望的行为规范;2) 将STL公式转化为可用于计算代价函数的数值形式;3) 利用模型预测控制(MPC)框架,在每个时间步长上,使用确定性路径积分控制(DPI)生成一组候选轨迹;4) 根据STL代价函数对这些轨迹进行评估和加权;5) 选择具有最低代价的轨迹作为当前时间步长的控制输入;6) 重复步骤3-5,直到规划完成。
关键创新:该方法最重要的技术创新点在于将确定性路径积分控制(DPI)与模型预测控制(MPC)相结合,用于解决带有STL代价函数的最优控制问题。与传统的优化方法相比,DPI不需要直接求解复杂的优化问题,而是通过采样和加权的方式来寻找最优解,从而提高了计算效率。此外,该方法能够有效地处理STL表达式中可能存在的不可微项。
关键设计:关键设计包括:1) STL代价函数的具体形式,需要能够准确地反映STL规范的要求;2) 确定性路径积分控制中的采样策略,需要保证采样的有效性和覆盖范围;3) 模型预测控制的预测 horizon 和控制频率,需要根据具体的应用场景进行调整;4) 代价函数的权重系数,需要根据不同的STL规范进行调整,以平衡不同规范之间的优先级。
🖼️ 关键图片
📊 实验亮点
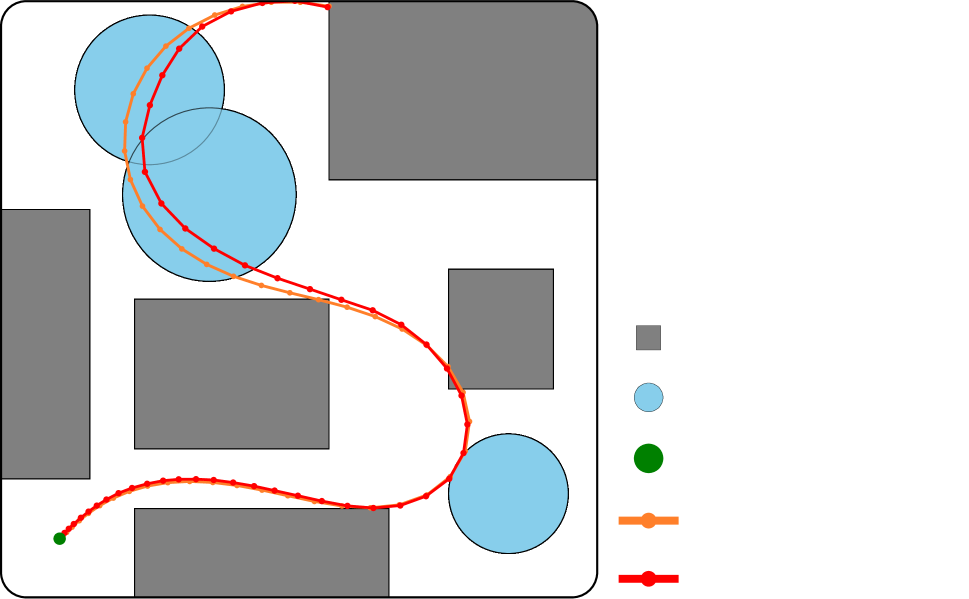
该论文在基准运动规划问题上验证了所提出方法的有效性,并与最先进的方法进行了比较。实验结果表明,该方法能够有效地解决带有STL代价函数的最优控制问题,并且在计算效率方面具有显著优势。具体的性能数据和对比基线在论文中进行了详细的展示。
🎯 应用场景
该研究成果可广泛应用于机器人运动规划、自动驾驶、无人机飞行控制等领域。通过使用STL,可以方便地描述复杂的任务规范,例如避障、区域访问、速度限制等。该方法能够提高这些系统在复杂环境中的自主性和可靠性,具有重要的实际应用价值和未来发展潜力。
📄 摘要(原文)
Formulating the intended behavior of a dynamic system can be challenging. Signal temporal logic (STL) is frequently used for this purpose due to its suitability in formalizing comprehensible, modular, and versatile spatiotemporal specifications. Due to scaling issues with respect to the complexity of the specifications and the potential occurrence of non-differentiable terms, classical optimization methods often solve STL-based problems inefficiently. Smoothing and approximation techniques can alleviate these issues but require changing the optimization problem. This paper proposes a novel sampling-based method based on model predictive path integral control to solve optimal control problems with STL cost functions. We demonstrate the effectiveness of our method on benchmark motion planning problems and compare its performance with state-of-the-art methods. The results show that our method efficiently solves optimal control problems with STL costs.