Mitigating Traffic Oscillations in Mixed Traffic Flow with Scalable Deep Koopman Predictive Control
作者: Hao Lyu, Yanyong Guo, Pan Liu, Nan Zheng, Ting Wang, Quansheng Yue
分类: eess.SY, cs.AI
发布日期: 2025-01-27 (更新: 2025-08-10)
期刊: Advanced Engineering Informatics, Vol. 71, Part A, 104258, 2026
DOI: 10.1016/j.aei.2025.104258
💡 一句话要点
提出AdapKoopPC框架,利用深度Koopman预测控制缓解混合交通流中的交通振荡。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱四:生成式动作 (Generative Motion)
关键词: 交通振荡抑制 深度Koopman网络 模型预测控制 混合交通流 联网自动驾驶车辆
📋 核心要点
- 混合交通流中HDV的非线性行为难以建模,阻碍了预测控制在交通振荡抑制中的应用。
- AdapKoopPC利用深度Koopman网络学习HDV的线性表示,并嵌入MPC,实现CAV的实时优化控制。
- 实验表明,AdapKoopPC能有效抑制交通振荡,计算成本低,且在低CAV渗透率下表现良好。
📝 摘要(中文)
本研究旨在缓解由联网自动驾驶车辆(CAVs)和人类驾驶车辆(HDVs)混合交通流中产生的交通振荡,这对于提高交通稳定性至关重要。关键挑战在于如何在计算可行的预测控制框架内对HDV的非线性、异构行为进行建模。为此,本研究提出了一种自适应深度Koopman预测控制框架(AdapKoopPC)。该框架采用了一种新型的深度Koopman网络AdapKoopnet,通过自适应地学习真实数据,将复杂的HDV车辆跟随动态表示为高维空间中的线性系统。然后,将这种学习到的线性表示嵌入到模型预测控制(MPC)方案中,从而实现对CAV的实时、可扩展和最优控制。我们使用HighD数据集和大量的数值模拟验证了我们的框架。结果表明,AdapKoopnet实现了优于基线模型的轨迹预测精度。此外,完整的AdapKoopPC控制器显著抑制了交通振荡,且计算成本较低,即使在低CAV渗透率下也表现出强大的性能。所提出的框架为提高现实混合交通环境中的稳定性提供了一种可扩展的、数据驱动的解决方案。代码已公开。
🔬 方法详解
问题定义:论文旨在解决混合交通流中,由于人类驾驶车辆(HDV)的非线性、异构行为导致的交通振荡问题。现有方法难以在计算复杂度可接受的前提下,精确建模HDV的行为,从而限制了预测控制在抑制交通振荡方面的应用。传统的车辆跟随模型难以准确捕捉HDV的复杂动态,而直接使用非线性模型进行预测控制则计算量巨大。
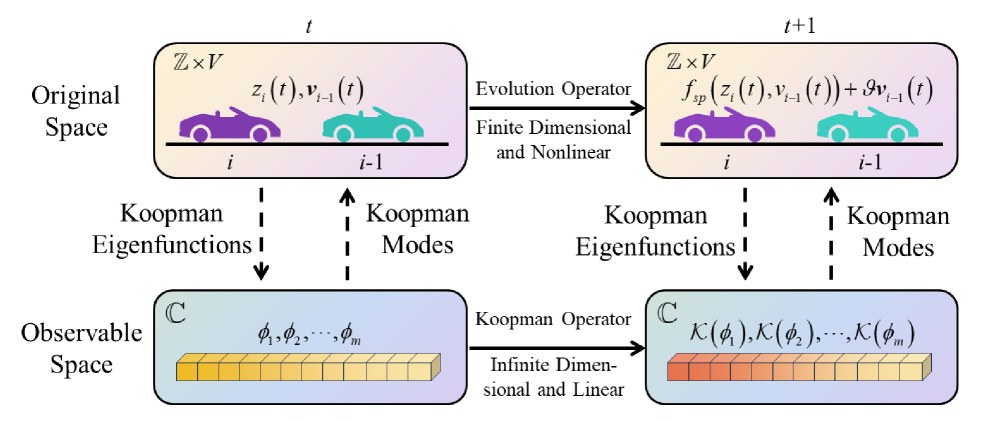
核心思路:论文的核心思路是利用Koopman理论,将非线性的HDV车辆跟随动态映射到一个高维线性空间中。这样,就可以在这个线性空间中进行预测和控制,从而降低计算复杂度。同时,使用深度学习网络(AdapKoopnet)自适应地从真实数据中学习这个Koopman算子,避免了手动建模的困难和误差。通过将学习到的线性表示嵌入到模型预测控制(MPC)框架中,实现对联网自动驾驶车辆(CAV)的实时优化控制,进而影响整个交通流,抑制交通振荡。
技术框架:AdapKoopPC框架主要包含两个模块:AdapKoopnet和MPC控制器。首先,AdapKoopnet从HighD等真实交通数据集中学习HDV的车辆跟随动态,并将其表示为一个线性系统。然后,将学习到的线性系统模型嵌入到MPC控制器中,用于预测未来交通状态。MPC控制器根据预测结果,优化CAV的控制策略,以最小化交通振荡。整个流程是数据驱动的,可以自适应地调整模型参数,以适应不同的交通环境。
关键创新:论文的关键创新在于提出了AdapKoopnet,一个自适应的深度Koopman网络,用于学习HDV的线性表示。与传统的Koopman方法相比,AdapKoopnet能够从数据中自动学习Koopman算子,无需手动选择基函数,从而更好地适应复杂的HDV行为。此外,将学习到的线性表示嵌入到MPC中,实现了实时、可扩展的交通控制。与直接使用非线性模型进行MPC相比,AdapKoopPC显著降低了计算复杂度,使其能够应用于大规模交通网络。
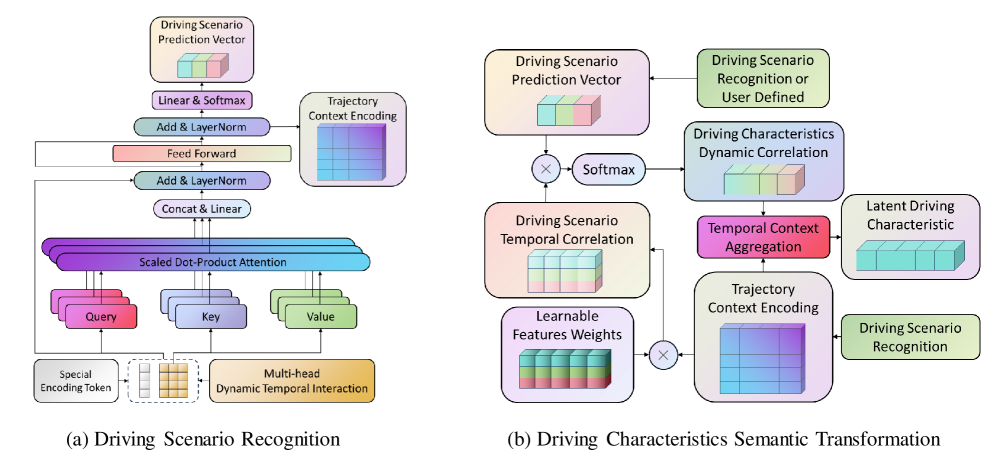
关键设计:AdapKoopnet的网络结构包括编码器和解码器两部分。编码器将HDV的原始状态映射到高维Koopman空间,解码器将Koopman空间的状态映射回原始状态。损失函数包括预测误差和重构误差两部分,用于训练网络。MPC控制器的目标函数是最小化交通振荡,约束条件包括车辆动力学约束和安全距离约束。关键参数包括Koopman空间的维度、MPC的预测步长和控制步长等。这些参数需要根据具体的交通场景进行调整。
🖼️ 关键图片

📊 实验亮点
实验结果表明,AdapKoopnet在轨迹预测精度上优于基线模型。完整的AdapKoopPC控制器能够显著抑制交通振荡,即使在CAV渗透率较低的情况下(例如20%),也能有效降低交通拥堵。此外,AdapKoopPC的计算成本较低,使其能够应用于大规模交通网络。与传统的MPC方法相比,AdapKoopPC在抑制交通振荡的同时,显著降低了计算复杂度。
🎯 应用场景
该研究成果可应用于智能交通系统,用于提高城市交通的稳定性和效率。通过控制一定比例的联网自动驾驶车辆,可以有效抑制交通拥堵和振荡,减少车辆燃油消耗和排放,提升道路通行能力。该技术还可用于高速公路匝道控制、交通信号优化等场景,具有广阔的应用前景和实际价值。
📄 摘要(原文)
Mitigating traffic oscillations in mixed flows of connected automated vehicles (CAVs) and human-driven vehicles (HDVs) is critical for enhancing traffic stability. A key challenge lies in modeling the nonlinear, heterogeneous behaviors of HDVs within computationally tractable predictive control frameworks. This study proposes an adaptive deep Koopman predictive control framework (AdapKoopPC) to address this issue. The framework features a novel deep Koopman network, AdapKoopnet, which represents complex HDV car-following dynamics as a linear system in a high-dimensional space by adaptively learning from naturalistic data. This learned linear representation is then embedded into a Model Predictive Control (MPC) scheme, enabling real-time, scalable, and optimal control of CAVs. We validate our framework using the HighD dataset and extensive numerical simulations. Results demonstrate that AdapKoopnet achieves superior trajectory prediction accuracy over baseline models. Furthermore, the complete AdapKoopPC controller significantly dampens traffic oscillations with lower computational cost, exhibiting strong performance even at low CAV penetration rates. The proposed framework offers a scalable and data-driven solution for enhancing stability in realistic mixed traffic environments. The code is made publicly available.