Uncertainty-Aware Digital Twins: Robust Model Predictive Control using Time-Series Deep Quantile Learning
作者: Yi-Ping Chen, Ying-Kuan Tsai, Vispi Karkaria, Wei Chen
分类: eess.SY
发布日期: 2025-01-17 (更新: 2025-05-06)
💡 一句话要点
提出基于时序深度分位数学习的不确定性感知数字孪生鲁棒模型预测控制方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 数字孪生 模型预测控制 不确定性量化 深度学习 分位数回归
📋 核心要点
- 现有数字孪生方法在实时决策中难以兼顾不确定性量化和系统行为的准确预测,导致控制性能下降。
- 论文提出一种基于时序深度分位数学习的鲁棒模型预测控制框架,利用TiDE进行多步预测并量化不确定性。
- 实验表明,该方法在定向能量沉积增材制造案例中,能够提供更精确的不确定性量化,优于现有鲁棒MPC方法。
📝 摘要(中文)
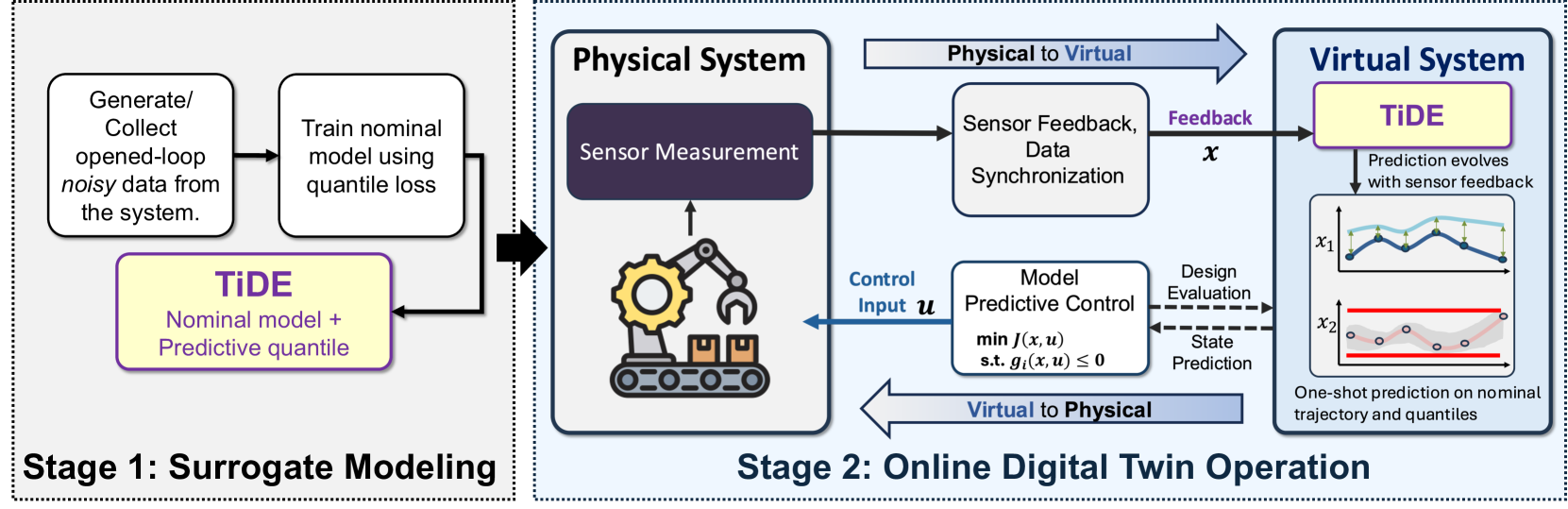
数字孪生作为物理系统的虚拟副本,为自主系统的主动控制策略开辟了新途径,能够实现实时监控、模型更新、预测和决策。然而,在数字孪生中实现考虑不确定性的实时决策,需要高效的不确定性量化(UQ)方法和由系统行为的准确预测驱动的优化,这对于基于学习的方法来说仍然是一个挑战。本文提出了一种同步多步鲁棒模型预测控制(MPC)框架,该框架将实时决策与数字孪生系统的不确定性感知相结合。该框架利用名为时序密集编码器(TiDE)的多步超前预测器作为替代模型,与仅提供单步超前预测的传统MPC模型不同。TiDE可以在一个步骤中预测预测范围内的未来状态,从而显著加速MPC。此外,TiDE的训练采用分位数回归,以对数据不确定性执行灵活且计算高效的UQ。因此,利用深度学习分位数,将鲁棒MPC问题转化为确定性优化问题,并提供安全缓冲区以适应扰动,从而提高约束满足率。结果表明,所提出的方法通过提供不那么保守的UQ优于现有的鲁棒MPC方法,并且已在涉及定向能量沉积(DED)增材制造的工程案例研究中证明了其有效性。这种主动且不确定性感知的控制能力使所提出的方法成为未来数字孪生应用和工程系统中实时过程控制的强大工具。
🔬 方法详解
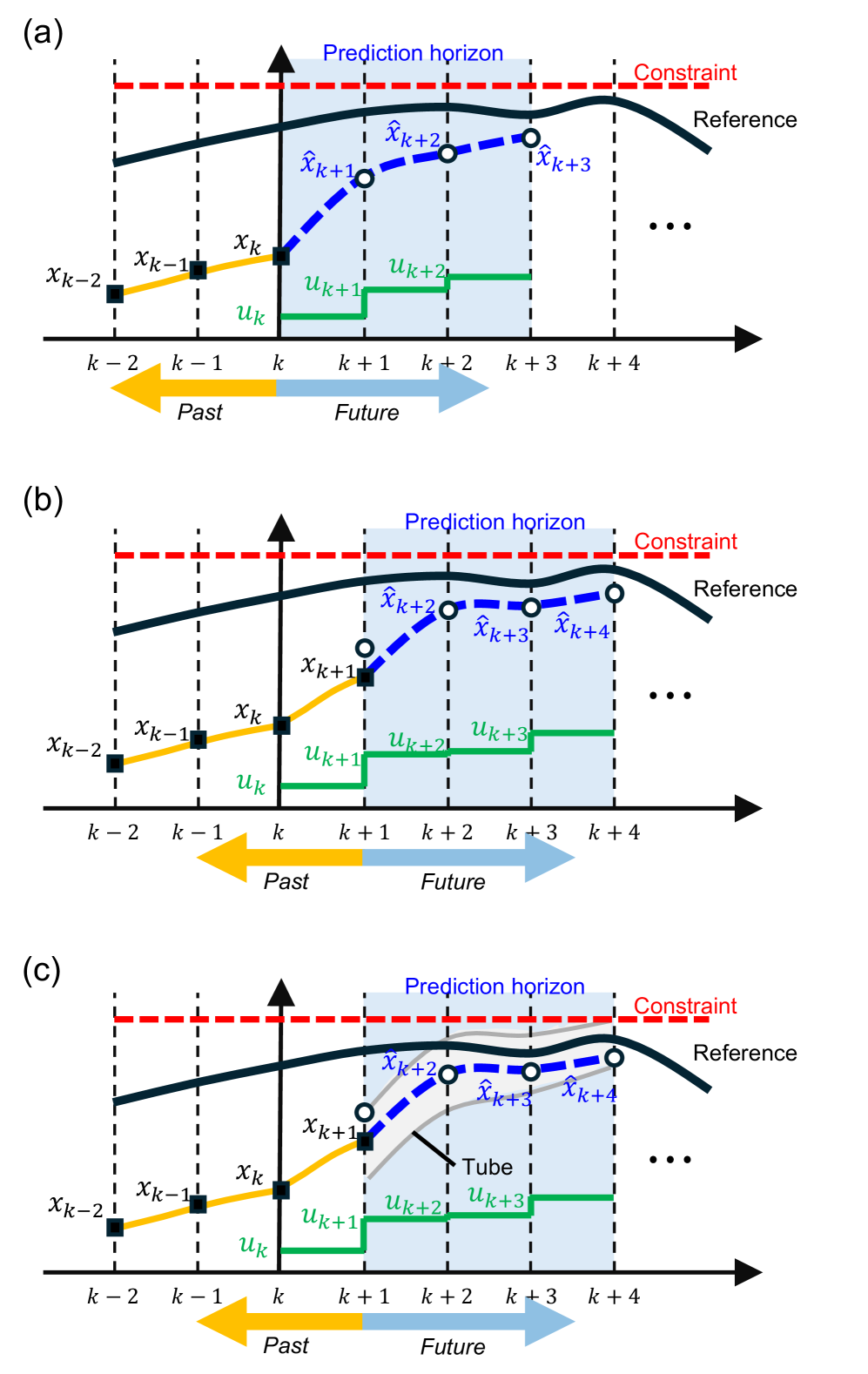
问题定义:现有数字孪生系统在实时决策时,面临着如何有效量化不确定性并进行准确预测的挑战。传统的模型预测控制(MPC)方法通常只进行单步预测,难以应对复杂系统的长期动态变化。此外,不确定性的存在使得控制策略的鲁棒性难以保证,容易导致约束违反。
核心思路:论文的核心思路是利用深度学习模型TiDE进行多步预测,并结合分位数回归来量化预测的不确定性。通过将不确定性纳入MPC的优化过程中,可以设计出更加鲁棒的控制策略,从而提高系统的安全性和可靠性。这种方法旨在解决传统MPC在数字孪生应用中面临的预测精度和鲁棒性问题。
技术框架:该框架主要包含以下几个模块:1) 数据采集与预处理:从物理系统中采集数据,并进行清洗和标准化等预处理操作。2) TiDE模型训练:利用历史数据训练TiDE模型,使其能够进行多步预测,并输出预测结果的分位数。3) 鲁棒MPC优化:将TiDE模型的预测结果和不确定性信息输入到鲁棒MPC优化器中,求解最优控制策略。4) 控制策略执行:将求解出的控制策略应用到物理系统中,实现闭环控制。
关键创新:该论文的关键创新在于以下几个方面:1) 提出了基于TiDE的多步预测方法,能够更准确地预测系统的未来状态。2) 采用分位数回归来量化预测的不确定性,能够提供更灵活和计算高效的UQ。3) 将不确定性信息纳入鲁棒MPC的优化过程中,提高了控制策略的鲁棒性。与现有方法相比,该方法能够提供更精确的预测和更鲁棒的控制。
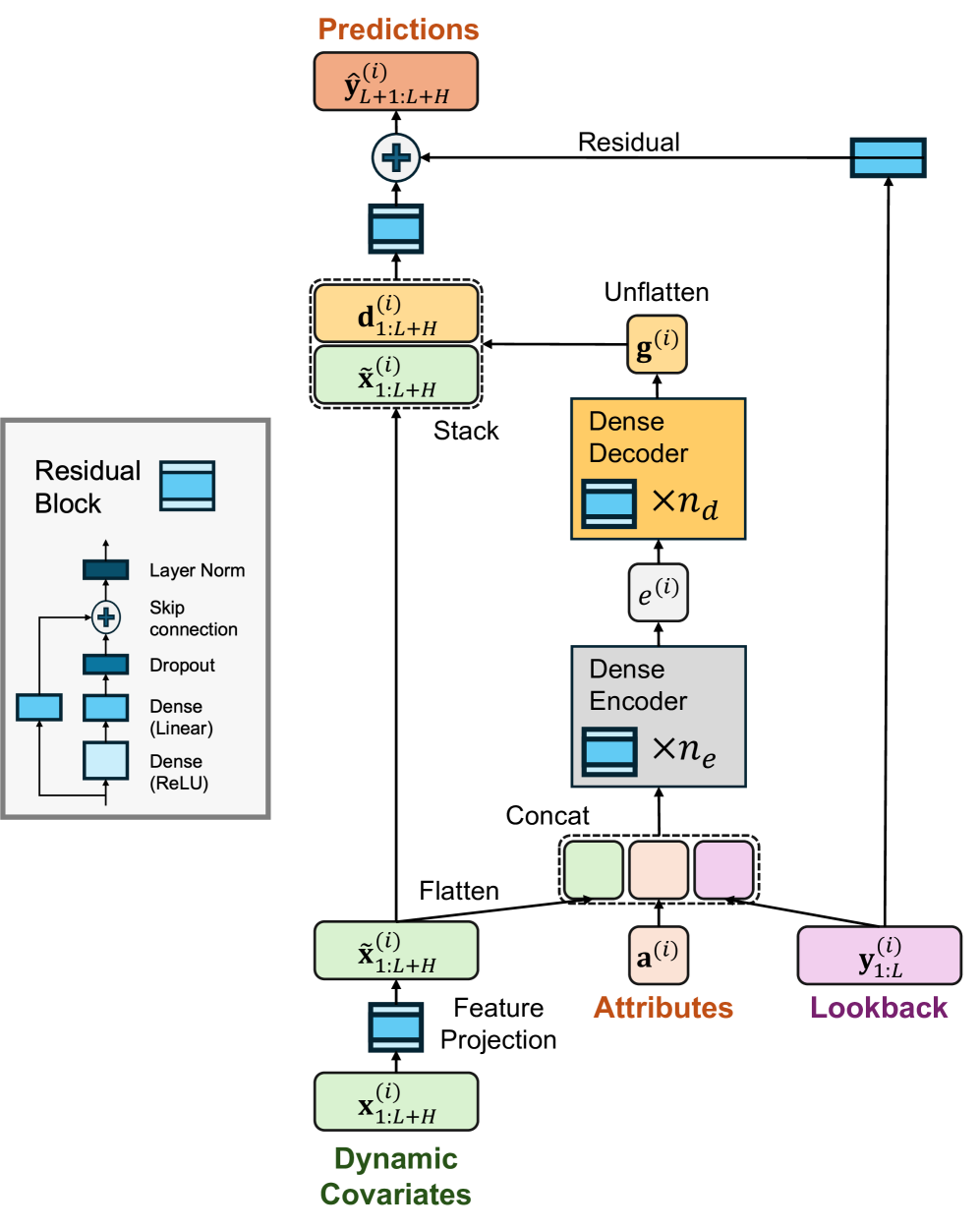
关键设计:TiDE模型采用Dense Encoder结构,能够有效地提取时序数据的特征。分位数回归的损失函数采用Pinball Loss,能够准确地估计预测结果的分位数。鲁棒MPC的优化问题被转化为确定性优化问题,通过引入安全缓冲区来应对不确定性。具体的参数设置包括TiDE模型的网络结构、学习率、batch size等,以及鲁棒MPC的约束条件和权重系数。
🖼️ 关键图片
📊 实验亮点
在定向能量沉积(DED)增材制造的案例研究中,该方法通过提供更精确的不确定性量化,优于现有的鲁棒MPC方法。实验结果表明,所提出的方法能够显著提高约束满足率,降低控制成本,并提高产品的质量和可靠性。具体的性能数据(如约束违反率、控制误差等)在论文中进行了详细的对比和分析。
🎯 应用场景
该研究成果可广泛应用于各种需要实时控制和不确定性管理的数字孪生系统,例如智能制造、机器人控制、自动驾驶、智能电网等领域。通过提高控制系统的鲁棒性和可靠性,可以降低生产成本、提高生产效率、保障系统安全,具有重要的实际应用价值和广阔的未来发展前景。
📄 摘要(原文)
Digital Twins, virtual replicas of physical systems that enable real-time monitoring, model updates, predictions, and decision-making, present novel avenues for proactive control strategies for autonomous systems. However, achieving real-time decision-making in Digital Twins considering uncertainty necessitates an efficient uncertainty quantification (UQ) approach and optimization driven by accurate predictions of system behaviors, which remains a challenge for learning-based methods. This paper presents a simultaneous multi-step robust model predictive control (MPC) framework that incorporates real-time decision-making with uncertainty awareness for Digital Twin systems. Leveraging a multistep ahead predictor named Time-Series Dense Encoder (TiDE) as the surrogate model, this framework differs from conventional MPC models that provide only one-step ahead predictions. In contrast, TiDE can predict future states within the prediction horizon in a one-shot, significantly accelerating MPC. Furthermore, quantile regression is employed with the training of TiDE to perform flexible while computationally efficient UQ on data uncertainty. Consequently, with the deep learning quantiles, the robust MPC problem is formulated into a deterministic optimization problem and provides a safety buffer that accommodates disturbances to enhance constraint satisfaction rate. As a result, the proposed method outperforms existing robust MPC methods by providing less-conservative UQ and has demonstrated efficacy in an engineering case study involving Directed Energy Deposition (DED) additive manufacturing. This proactive while uncertainty-aware control capability positions the proposed method as a potent tool for future Digital Twin applications and real-time process control in engineering systems.