Enhanced sampled-data model predictive control via nonlinear lifting
作者: Nuthasith Gerdpratoom, Fumiya Matsuzaki, Yutaka Yamamoto, Kaoru Yamamoto
分类: eess.SY
发布日期: 2025-01-10
期刊: International Journal of Robust and Nonlinear Control (2025): 1-12
DOI: 10.1002/rnc.70083
💡 一句话要点
提出基于非线性提升的采样数据模型预测控制,提升非线性系统控制性能。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 非线性系统 模型预测控制 提升技术 采样数据系统 数值积分
📋 核心要点
- 现有NMPC方法在处理非线性系统时,难以有效捕捉采样间隔内的系统行为,导致控制性能受限。
- 本文提出一种基于非线性提升的NMPC框架,利用快速采样快速保持近似和数值方法逼近系统动态。
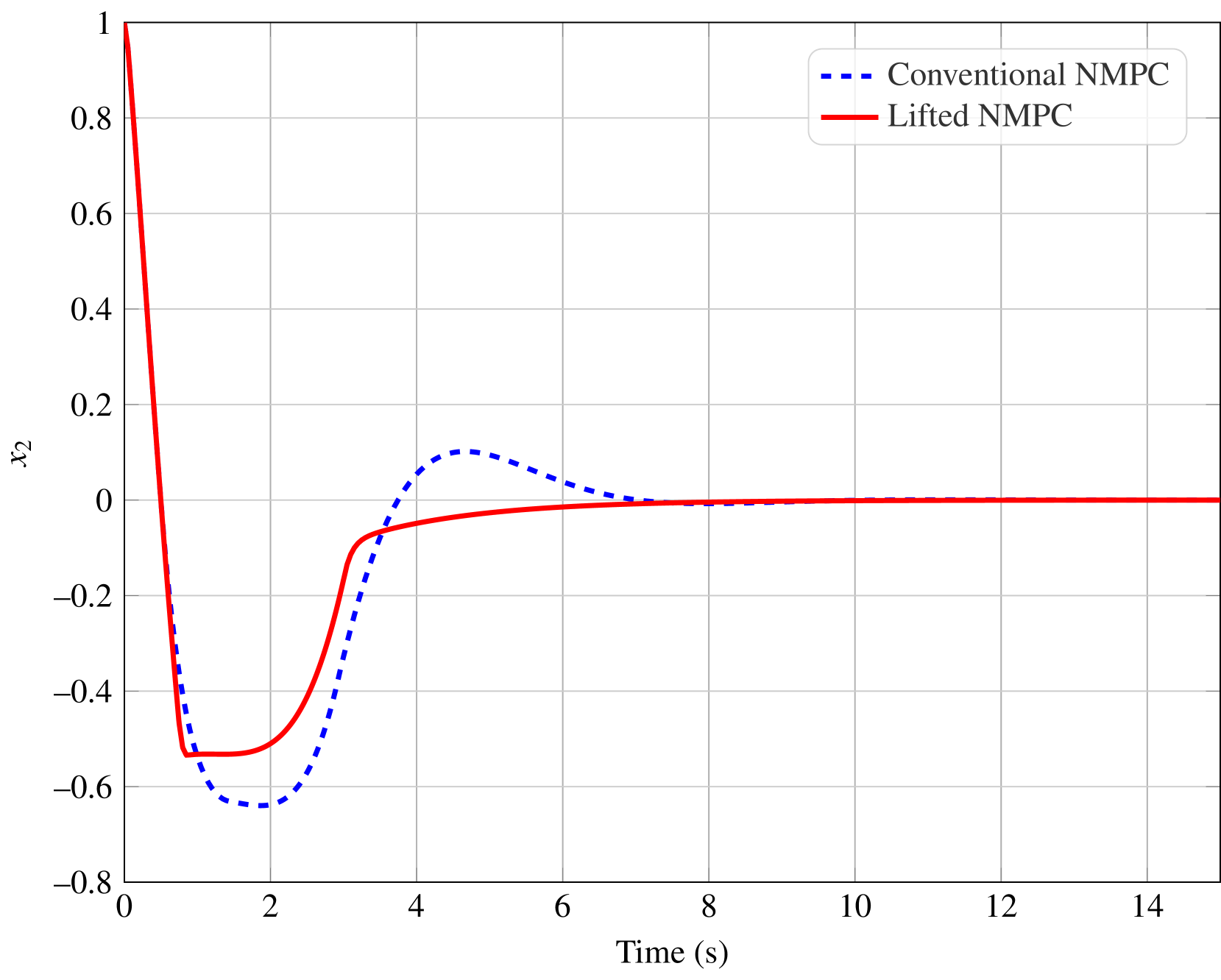
- 在范德堡振荡器和倒立摆小车上的实验表明,该方法在稳定时间和控制精度上优于传统NMPC。
📝 摘要(中文)
本文提出了一种新颖的非线性模型预测控制(NMPC)框架,该框架结合了一种提升技术,旨在增强非线性系统的控制性能。虽然提升技术已广泛应用于线性系统中以捕获采样间行为,但其在非线性系统中的应用仍未被探索。我们通过构建一个NMPC方案来弥补这一差距,该方案结合了快速采样快速保持(FSFH)近似和数值方法来近似系统动力学和成本函数。通过范德堡振荡器和倒立摆小车两个案例研究验证了所提出的方法。仿真结果表明,在减少稳定时间和提高控制精度方面,基于提升的NMPC优于传统的NMPC。这些发现强调了基于提升的NMPC在有效控制非线性系统方面的潜力,为实时应用提供了一种实用的解决方案。
🔬 方法详解
问题定义:论文旨在解决非线性系统模型预测控制中,传统NMPC方法难以有效捕捉采样间隔内的系统行为,从而导致控制性能下降的问题。现有方法通常直接使用离散化模型进行预测,忽略了采样间隔内的动态变化,尤其是在采样频率较低时,这种影响更为显著。
核心思路:论文的核心思路是引入“提升”(Lifting)技术,将连续时间非线性系统转化为一种等效的离散时间表示,该表示能够更好地捕捉采样间隔内的系统行为。通过这种方式,NMPC控制器可以基于更精确的模型进行预测和优化,从而提高控制性能。这种方法借鉴了线性系统中提升技术的成功应用,并将其扩展到非线性系统。
技术框架:该NMPC框架主要包含以下几个阶段:1) 系统建模:首先,对非线性系统进行建模,得到连续时间状态空间方程。2) 快速采样快速保持(FSFH)近似:利用FSFH方法对系统进行离散化,得到一个近似的离散时间模型。FSFH通过在每个采样间隔内使用多个快速采样和保持操作来逼近连续时间动态。3) 数值积分:使用数值积分方法(如Runge-Kutta方法)来计算系统在每个采样间隔内的状态演化。4) NMPC优化:基于离散时间模型和数值积分结果,构建NMPC优化问题,包括状态约束、控制输入约束和成本函数。5) 控制输入计算:求解NMPC优化问题,得到最优控制输入序列,并将其应用于实际系统。
关键创新:该论文的关键创新在于将提升技术应用于非线性系统的模型预测控制。虽然提升技术在线性系统中已被广泛应用,但将其扩展到非线性系统面临诸多挑战,例如非线性动态的复杂性和计算复杂度。本文通过结合FSFH近似和数值积分方法,有效地解决了这些问题,提出了一种实用的非线性提升NMPC框架。与传统NMPC相比,该方法能够更精确地预测系统行为,从而提高控制性能。
关键设计:关键设计包括:1) FSFH参数:选择合适的快速采样频率,以保证离散化模型的精度。2) 数值积分方法:选择合适的数值积分方法(如四阶Runge-Kutta方法)和步长,以保证数值积分的精度和稳定性。3) 成本函数设计:设计合适的成本函数,以实现期望的控制目标,例如跟踪误差最小化和控制能量最小化。4) 优化算法:选择合适的优化算法(如序列二次规划SQP),以高效地求解NMPC优化问题。
🖼️ 关键图片


📊 实验亮点
实验结果表明,在范德堡振荡器和倒立摆小车两个案例中,所提出的基于提升的NMPC方法在稳定时间和控制精度方面均优于传统的NMPC。具体而言,在相同的控制目标下,基于提升的NMPC能够更快地将系统稳定到期望状态,并且具有更小的跟踪误差。这些结果验证了该方法在非线性系统控制方面的有效性。
🎯 应用场景
该研究成果可应用于各种需要高精度控制的非线性系统,例如机器人控制、航空航天控制、过程控制和电力系统控制。通过更精确地预测系统行为,该方法可以提高控制性能,降低能源消耗,并提高系统的稳定性和可靠性。未来,该方法有望在自动驾驶、智能制造等领域发挥重要作用。
📄 摘要(原文)
This paper introduces a novel nonlinear model predictive control (NMPC) framework that incorporates a lifting technique to enhance control performance for nonlinear systems. While the lifting technique has been widely employed in linear systems to capture intersample behaviour, their application to nonlinear systems remains unexplored. We address this gap by formulating an NMPC scheme that combines fast-sample fast-hold (FSFH) approximations and numerical methods to approximate system dynamics and cost functions. The proposed approach is validated through two case studies: the Van der Pol oscillator and the inverted pendulum on a cart. Simulation results demonstrate that the lifted NMPC outperforms conventional NMPC in terms of reduced settling time and improved control accuracy. These findings underscore the potential of the lifting-based NMPC for efficient control of nonlinear systems, offering a practical solution for real-time applications.