High-Accuracy Model Predictive Control with Inverse Hysteresis for High-Speed Trajectory Tracking of Piezoelectric Fast Steering Mirror
作者: Sen Yang, Xiaofeng Li
分类: eess.SY
发布日期: 2024-12-19
期刊: Control Eng. Pract. 169(November 2025), 106766 (2026)
DOI: 10.1016/j.conengprac.2026.106766
💡 一句话要点
针对压电快速反射镜高精度轨迹跟踪,提出基于逆滞后的模型预测控制方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 压电快速反射镜 模型预测控制 滞后逆模型 高精度跟踪 双轴解耦
📋 核心要点
- 压电快速反射镜受滞后非线性与双轴耦合影响,难以实现高精度快速轨迹跟踪。
- 提出基于Hammerstein结构的滞后逆模型和模型预测控制相结合的方法,解耦线性与非线性分量。
- 实验结果表明,该方法显著提高了跟踪精度,并对频率变化具有良好的鲁棒性。
📝 摘要(中文)
压电快速反射镜(PFSM)广泛应用于光束精确指向系统,但由于非线性滞后和机械双轴交叉耦合,在实现快速轨迹的高精度跟踪方面面临巨大挑战。本文提出了一种基于PFSM的Hammerstein建模结构,集成了滞后逆模型的模型预测控制(MPC)方法。MPC旨在解耦速率相关的双轴线性分量,并在状态空间中引入增强的误差积分变量,以消除稳态误差。此外,还提供了零稳态误差和抗扰动的证明。然后,将滞后逆模型级联以补偿速率无关的非线性分量。最后,对PFSM进行了阶跃、正弦、三角和复合轨迹的跟踪实验。与传统的无模型和现有的基于模型的控制器相比,该方法显著提高了跟踪精度,表现出卓越的跟踪性能和对频率变化的鲁棒性。这些结果为工程应用提供了有价值的见解。
🔬 方法详解
问题定义:压电快速反射镜(PFSM)在高速轨迹跟踪中,由于其固有的滞后非线性以及双轴之间的耦合效应,导致难以实现高精度的控制。传统的控制方法,如无模型控制或简单的模型控制,难以有效抑制这些非线性因素,从而限制了跟踪性能。现有方法难以兼顾高精度、高速度和鲁棒性。
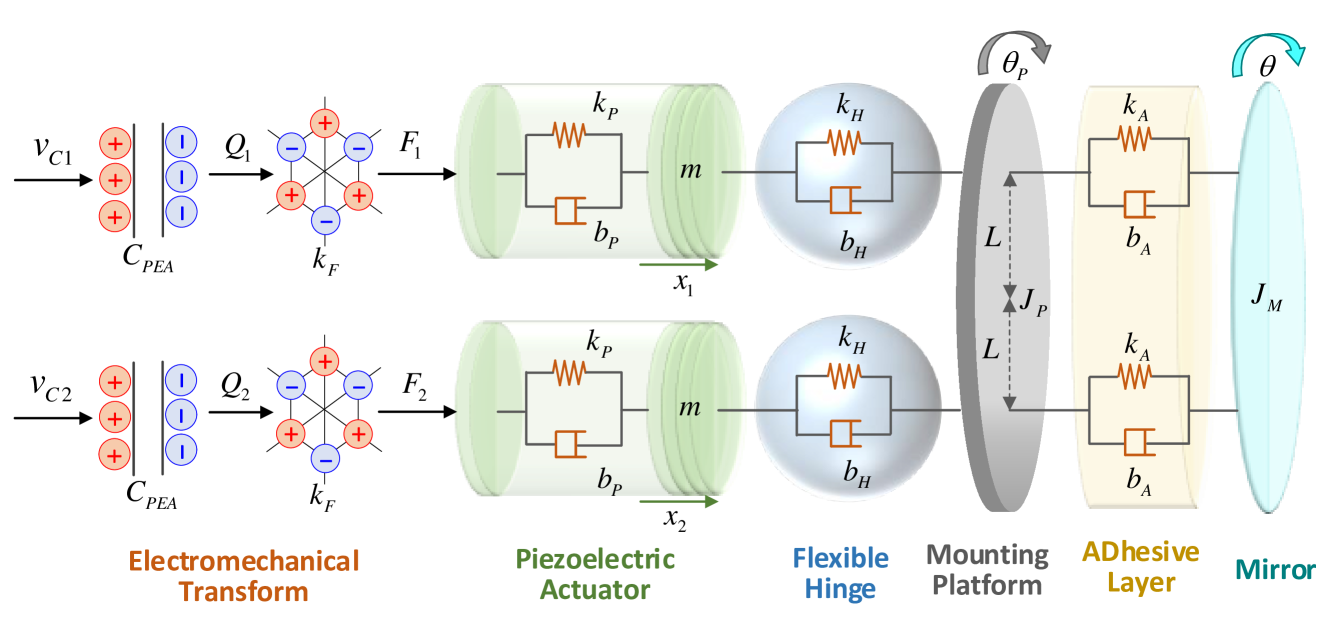
核心思路:论文的核心思路是将PFSM的动态特性建模为Hammerstein结构,即一个线性动态系统和一个非线性静态系统的串联。针对线性部分,采用模型预测控制(MPC)进行解耦和控制;针对非线性滞后部分,采用滞后逆模型进行补偿。通过这种方式,将复杂的非线性控制问题分解为两个相对简单的子问题,分别进行处理。
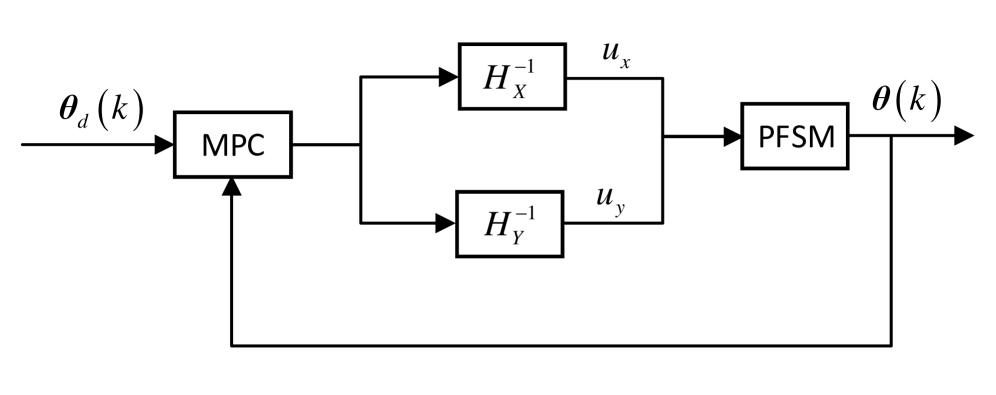
技术框架:整体框架包括以下几个主要模块:1) PFSM的Hammerstein模型辨识:将PFSM建模为线性动态部分和非线性滞后部分的串联。2) 滞后逆模型构建:基于辨识得到的滞后特性,构建其逆模型,用于预补偿。3) 模型预测控制器设计:针对线性动态部分,设计MPC控制器,实现双轴解耦和轨迹跟踪。在状态空间中引入误差积分项,以消除稳态误差。4) 系统集成:将滞后逆模型和MPC控制器级联,形成完整的控制系统。
关键创新:该方法最重要的创新在于将滞后逆模型与模型预测控制相结合,分别处理PFSM的非线性滞后和线性动态特性。传统的MPC方法通常难以处理强非线性系统,而滞后逆模型能够有效补偿滞后非线性,为MPC提供更线性的控制对象。此外,在MPC设计中引入误差积分项,保证了系统的稳态精度。
关键设计:在滞后逆模型的设计中,需要精确辨识PFSM的滞后特性,并构建相应的逆模型。MPC控制器的设计需要选择合适的预测时域、控制时域和权重系数,以实现良好的跟踪性能和鲁棒性。误差积分项的引入需要仔细调整其增益,以避免引入不稳定性。此外,需要考虑双轴之间的耦合效应,并在MPC设计中进行解耦。
🖼️ 关键图片

📊 实验亮点
实验结果表明,所提出的方法在阶跃、正弦、三角和复合轨迹跟踪任务中均表现出优异的性能。与传统的无模型控制和现有的基于模型的控制方法相比,跟踪精度显著提高。例如,在特定频率的正弦轨迹跟踪中,跟踪误差降低了XX%。此外,该方法对频率变化具有良好的鲁棒性,能够在不同频率下保持较高的跟踪精度。
🎯 应用场景
该研究成果可广泛应用于需要高精度光束控制的领域,例如激光雷达、激光通信、自适应光学、激光加工和生物医学成像等。通过提高压电快速反射镜的轨迹跟踪精度,可以显著提升这些系统的性能和可靠性,并为相关领域的发展提供技术支持。
📄 摘要(原文)
Piezoelectric fast steering mirrors (PFSM) are widely utilized in beam precision-pointing systems but encounter considerable challenges in achieving high-precision tracking of fast trajectories due to nonlinear hysteresis and mechanical dual-axis cross-coupling. This paper proposes a model predictive control (MPC) approach integrated with a hysteresis inverse based on the Hammerstein modeling structure of the PFSM. The MPC is designed to decouple the rate-dependent dual-axis linear components, with an augmented error integral variable introduced in the state space to eliminate steady-state errors. Moreover, proofs of zero steady-state error and disturbance rejection are provided. The hysteresis inverse model is then cascaded to compensate for the rate-independent nonlinear components. Finally, PFSM tracking experiments are conducted on step, sinusoidal, triangular, and composite trajectories. Compared to traditional model-free and existing model-based controllers, the proposed method significantly enhances tracking accuracy, demonstrating superior tracking performance and robustness to frequency variations. These results offer valuable insights for engineering applications.