Reliably Learn to Trim Multiparametric Quadratic Programs via Constraint Removal
作者: Zhinan Hou, Keyou You
分类: math.OC, eess.SY
发布日期: 2024-12-15
💡 一句话要点
提出基于约束移除的可靠学习方法,加速求解多参数二次规划问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 多参数二次规划 模型预测控制 约束移除 冗余约束 在线优化
📋 核心要点
- 现有mp-QP求解算法计算成本高昂,主要瓶颈在于处理大量冗余的线性不等式约束。
- 该方法通过学习先前已求解的mp-QP结果,可靠地移除冗余约束,从而精简mp-QP,降低求解成本。
- 实验表明,该方法能有效减少MPC中mp-QP的约束数量,且可通过增加离线计算进一步提升效果。
📝 摘要(中文)
在许多应用中,需要在资源受限的硬件上快速求解一系列凸多参数二次规划(mp-QP)问题。这是一个重要的任务,也是控制和优化领域几十年来的研究热点。现有求解算法的主要计算成本在于处理大量的线性不等式约束,但其中大部分是冗余的,移除它们不会改变最优解。本文从先前已求解的mp-QP结果中学习,提出了一种新的方法,通过约束移除来可靠地精简(未求解的)mp-QP,从而降低求解成本。进一步扩展到精简模型预测控制(MPC)的mp-QP,其参数向量从线性系统中采样。重要的是,在线和离线求解的mp-QP都可以用于自适应地精简闭环系统中的mp-QP。结果表明,MPC的精简mp-QP中的线性不等式数量在有限的时间步内减少到零,并且可以通过增加离线计算来减少。最后,仿真实验证明了该精简方法在移除冗余约束方面的效率。
🔬 方法详解
问题定义:论文旨在解决在资源受限的硬件上快速求解一系列凸多参数二次规划(mp-QP)问题。现有方法的主要痛点在于需要处理大量的线性不等式约束,而其中大部分约束是冗余的,增加了计算负担。
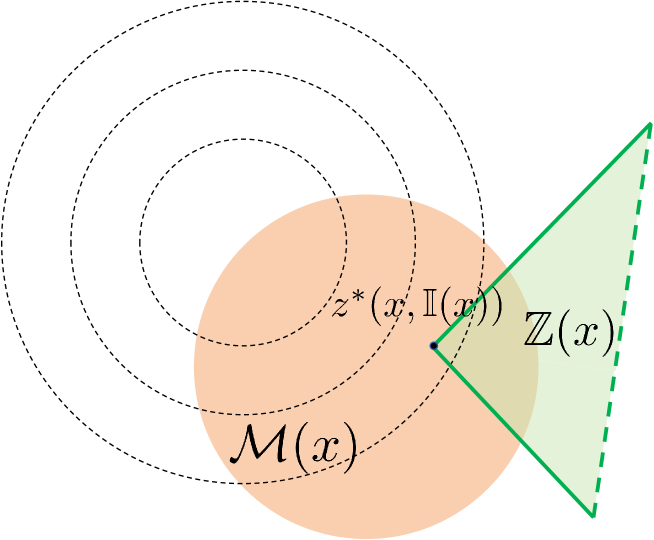
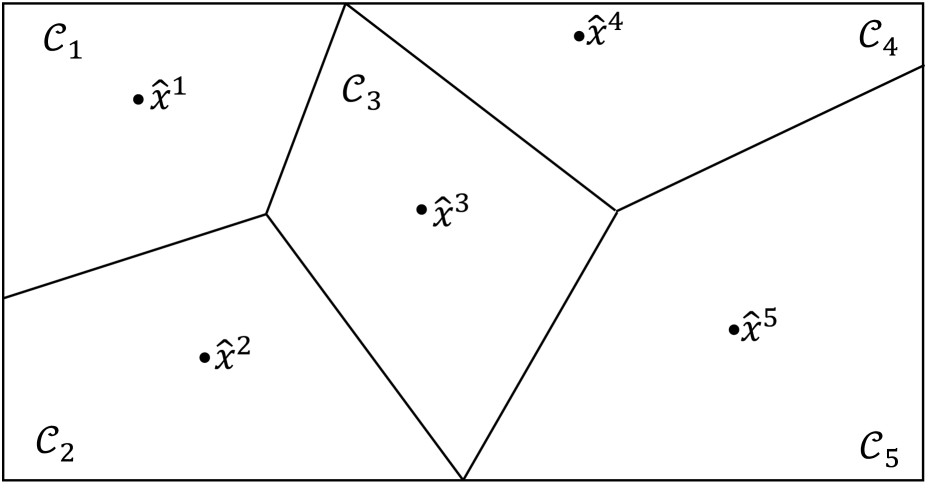
核心思路:论文的核心思路是通过学习先前已求解的mp-QP的结果,识别并移除冗余约束,从而精简mp-QP,降低求解成本。这种方法基于一个假设:相似的mp-QP问题具有相似的冗余约束模式。
技术框架:该方法包含以下主要阶段:1) 离线学习阶段:利用已求解的mp-QP数据,学习约束冗余模式。2) 在线精简阶段:对于新的mp-QP,利用学习到的模式预测冗余约束,并将其移除。3) 求解阶段:求解精简后的mp-QP。4) 自适应更新阶段:利用在线求解的mp-QP结果,更新约束冗余模式,提高后续精简的准确性。
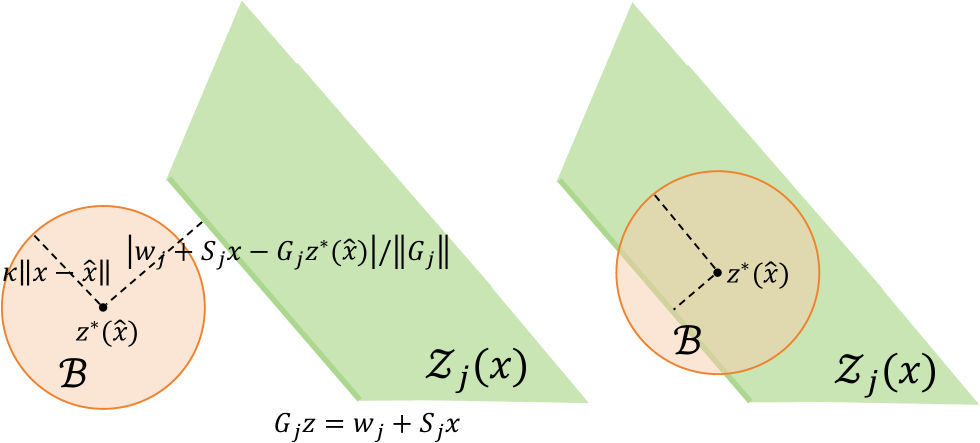
关键创新:该方法最重要的创新在于提出了一种可靠的约束移除策略,能够保证在移除约束的同时,不会改变最优解。此外,该方法能够自适应地学习和更新约束冗余模式,从而提高精简的效率和准确性。与现有方法相比,该方法能够显著减少需要处理的约束数量,从而降低计算成本。
关键设计:论文中涉及的关键设计包括:1) 如何选择用于学习的mp-QP数据;2) 如何定义和学习约束冗余模式;3) 如何保证约束移除的可靠性;4) 如何设计自适应更新策略。具体的参数设置和算法细节在论文中进行了详细描述,但具体实现细节未知。
🖼️ 关键图片
📊 实验亮点
仿真结果表明,该方法能够有效地移除冗余约束,显著减少MPC中mp-QP的约束数量,并且可以通过增加离线计算来进一步提升效果。具体性能数据未知,但论文强调了该方法在降低计算成本方面的潜力。该方法能够自适应地学习和更新约束冗余模式,从而提高精简的效率和准确性。
🎯 应用场景
该研究成果可广泛应用于需要快速求解mp-QP的领域,例如模型预测控制(MPC)、机器人路径规划、资源分配等。通过降低mp-QP的求解成本,可以提高控制系统的实时性和鲁棒性,从而实现更高效、更可靠的自动化控制。未来,该方法有望应用于更复杂的优化问题,并与其他优化技术相结合,进一步提升优化性能。
📄 摘要(原文)
In a wide range of applications, we are required to rapidly solve a sequence of convex multiparametric quadratic programs (mp-QPs) on resource-limited hardwares. This is a nontrivial task and has been an active topic for decades in control and optimization communities. Observe that the main computational cost of existing solution algorithms lies in addressing many linear inequality constraints, though their majority are redundant and removing them will not change the optimal solution. This work learns from the results of previously solved mp-QP(s), based on which we propose novel methods to reliably trim (unsolved) mp-QPs via constraint removal, and the trimmed mp-QPs can be much cheaper to solve. Then, we extend to trim mp-QPs of model predictive control (MPC) whose parameter vectors are sampled from linear systems. Importantly, both online and offline solved mp-QPs can be utilized to adaptively trim mp-QPs in the closed-loop system. We show that the number of linear inequalities in the trimmed mp-QP of MPC decreases to zero in a finite timestep, which also can be reduced by increasing offline computation. Finally, simulations are performed to demonstrate the efficiency of our trimming method in removing redundant constraints.