Time-Series-Informed Closed-loop Learning for Sequential Decision Making and Control
作者: Sebastian Hirt, Lukas Theiner, Rolf Findeisen
分类: eess.SY, cs.LG
发布日期: 2024-12-03 (更新: 2025-11-17)
备注: 7 pages, 3 figures
💡 一句话要点
提出时间序列指导的多置信度贝叶斯优化,用于序列决策和控制的闭环学习。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 贝叶斯优化 闭环控制 模型预测控制 时间序列 多置信度学习
📋 核心要点
- 传统贝叶斯优化在闭环控制参数调优中忽略时间序列信息,导致样本效率低,收敛慢。
- 论文提出时间序列指导的多置信度贝叶斯优化,将闭环时间作为置信度维度,利用中间性能评估。
- 实验表明,该方法在资源消耗减半的情况下,性能与传统方法相当,相同资源下性能更优。
📝 摘要(中文)
序列决策算法(如模型预测控制)的闭环性能很大程度上取决于控制器参数的选择。贝叶斯优化允许从闭环实验中学习参数,但标准贝叶斯优化将其视为黑盒问题,忽略了闭环轨迹的时间结构,导致收敛速度慢且实验资源利用率低。我们提出了一种时间序列指导的多置信度贝叶斯优化框架,该框架将置信度维度与闭环时间对齐,从而可以将闭环实验中的中间性能评估作为较低置信度的观察结果纳入。此外,我们推导了概率提前停止准则,以基于代理模型的后验信念终止无希望的闭环实验,避免了不良参数化的完整episode,从而减少了资源使用。在非线性控制基准上的仿真结果表明,与标准黑盒贝叶斯优化方法相比,所提出的方法以大约一半的实验资源实现了相当的闭环性能,并且在使用相同资源预算时产生了更好的最终性能,突出了利用时间结构进行样本高效闭环控制器调优的价值。
🔬 方法详解
问题定义:论文旨在解决序列决策和控制算法(如模型预测控制)中,控制器参数调优的效率问题。现有的贝叶斯优化方法将闭环控制过程视为黑盒,忽略了闭环轨迹的时间序列结构,导致样本效率低下,需要大量的实验才能找到合适的参数。
核心思路:论文的核心思路是利用闭环控制过程的时间序列特性,将闭环时间作为贝叶斯优化中的置信度维度。通过在闭环实验过程中进行中间性能评估,并将这些评估结果作为低置信度的观察值,从而在实验早期就能对参数的优劣进行判断,加速优化过程。
技术框架:该框架基于多置信度贝叶斯优化。首先,定义闭环控制任务和待优化的控制器参数。然后,使用贝叶斯优化算法选择一组参数进行闭环实验。在实验过程中,定期对系统性能进行评估,并将这些评估结果作为低置信度的观察值输入到贝叶斯优化模型中。贝叶斯优化模型根据这些观察值更新参数的后验分布,并选择下一组待评估的参数。此外,该框架还包含一个概率提前停止准则,用于判断当前参数是否具有前景,如果判断结果为否,则提前终止实验,避免浪费资源。
关键创新:该方法最重要的创新点在于将闭环控制的时间序列结构融入到贝叶斯优化框架中。通过将闭环时间作为置信度维度,可以利用实验过程中的中间性能评估结果,从而更早地对参数的优劣进行判断,提高样本效率。与传统的黑盒贝叶斯优化方法相比,该方法能够更有效地利用实验数据,加速参数调优过程。
关键设计:论文提出了概率提前停止准则,该准则基于代理模型的后验信念,用于判断当前参数是否具有前景。具体来说,该准则计算当前参数在未来能够达到期望性能的概率,如果该概率低于某个阈值,则认为该参数没有前景,并提前终止实验。阈值的选择会影响提前停止的激进程度,需要在效率和性能之间进行权衡。此外,论文还使用了高斯过程作为代理模型,用于对闭环控制系统的性能进行建模。
🖼️ 关键图片

📊 实验亮点
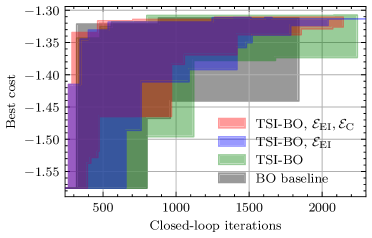
在非线性控制基准上的仿真结果表明,与标准黑盒贝叶斯优化方法相比,所提出的方法能够以大约一半的实验资源实现相当的闭环性能。更重要的是,在使用相同资源预算的情况下,该方法能够获得更好的最终性能,证明了利用时间结构进行样本高效闭环控制器调优的有效性。
🎯 应用场景
该研究成果可应用于各种需要进行闭环控制参数调优的领域,例如机器人控制、自动驾驶、过程控制等。通过提高参数调优的效率,可以缩短开发周期,降低成本,并提高控制系统的性能。该方法尤其适用于实验成本较高或实验时间较长的场景。
📄 摘要(原文)
Closed-loop performance of sequential decision making algorithms, such as model predictive control, depends strongly on the choice of controller parameters. Bayesian optimization allows learning of parameters from closed-loop experiments, but standard Bayesian optimization treats this as a black-box problem and ignores the temporal structure of closed-loop trajectories, leading to slow convergence and inefficient use of experimental resources. We propose a time-series-informed multi-fidelity Bayesian optimization framework that aligns the fidelity dimension with closed-loop time, enabling intermediate performance evaluations within a closed-loop experiment to be incorporated as lower-fidelity observations. Additionally, we derive probabilistic early stopping criteria to terminate unpromising closed-loop experiments based on the surrogate model's posterior belief, avoiding full episodes for poor parameterizations and thereby reducing resource usage. Simulation results on a nonlinear control benchmark demonstrate that, compared to standard black-box Bayesian optimization approaches, the proposed method achieves comparable closed-loop performance with roughly half the experimental resources, and yields better final performance when using the same resource budget, highlighting the value of exploiting temporal structure for sample-efficient closed-loop controller tuning.