On the Application of Model Predictive Control to a Weighted Coverage Path Planning Problem
作者: Kilian Schweppe, Ludmila Moshagen, Georg Schildbach
分类: eess.SY, cs.MA, cs.RO
发布日期: 2024-11-13 (更新: 2025-10-01)
💡 一句话要点
提出基于模型预测控制的加权覆盖路径规划方法,应用于搜索救援等场景
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 模型预测控制 覆盖路径规划 加权覆盖 搜索救援 无人系统
📋 核心要点
- 加权覆盖路径规划问题在搜索救援等领域有重要应用,传统方法难以有效处理连续空间和重复访问等约束。
- 论文提出一种新的MPC公式,引入覆盖约束(CCs)来解决WCPP问题,允许智能体在连续空间中移动并重复访问。
- 实验结果表明,使用TSP启发式初始化后的MPC方法,显著优于朴素MPC方法,提升了覆盖效率。
📝 摘要(中文)
本文研究了模型预测控制(MPC)在加权覆盖路径规划(WCPP)问题中的应用。该问题广泛存在于实际应用中,包括搜索和救援(SAR)任务。基本设置是一个(或多个)智能体在一个给定的搜索空间中移动,并从给定的空间分布中收集奖励。与人工势场不同,每个奖励只能被收集一次。与旅行商问题(TSP)不同,智能体在连续空间中移动。此外,它不必覆盖所有位置,并且/或者可以返回到先前访问过的位置。本文通过一种新的带有覆盖约束(CCs)的模型预测控制(MPC)公式来解决WCPP问题。结果表明,如果使用基于TSP的启发式方法初始化求解器,则解决方案会更有效。通过一个小型的仿真研究表明,无论是否使用这种初始化,所提出的MPC方法都明显优于一种朴素的MPC公式。
🔬 方法详解
问题定义:论文旨在解决加权覆盖路径规划(WCPP)问题,该问题要求智能体在连续空间中移动,收集空间分布的奖励,且每个奖励只能收集一次。现有方法,如人工势场,无法保证最优覆盖。旅行商问题(TSP)虽然可以规划路径,但其离散空间和必须覆盖所有位置的限制,不适用于WCPP问题。此外,智能体可能需要返回之前访问过的位置,进一步增加了问题的复杂性。
核心思路:论文的核心思路是利用模型预测控制(MPC)的滚动优化能力,在每个时间步预测未来一段时间内的最优路径,并考虑覆盖约束(CCs)。通过不断更新预测和控制,智能体能够自适应地调整路径,从而有效地覆盖目标区域并收集奖励。
技术框架:该方法基于MPC框架,主要包含以下几个模块:1)状态估计:估计智能体当前的位置和已覆盖区域;2)预测模型:预测智能体在未来一段时间内的状态变化;3)优化器:根据预测模型和覆盖约束,求解最优控制序列;4)控制执行:将最优控制序列的第一个控制量作用于智能体。整个过程循环进行,直到满足覆盖要求或达到最大迭代次数。
关键创新:论文的关键创新在于提出了带有覆盖约束(CCs)的MPC公式。这些约束确保智能体在规划路径时,考虑到已覆盖区域,避免重复覆盖,从而提高覆盖效率。此外,论文还提出使用基于TSP的启发式方法初始化MPC求解器,以获得更好的初始解,加速收敛。
关键设计:覆盖约束(CCs)的具体形式未知,但可以推测其目的是惩罚对已覆盖区域的重复访问。TSP启发式初始化的具体方法也未知,但其目的是为MPC提供一个较好的初始路径,避免陷入局部最优。论文中可能还涉及一些参数设置,例如预测时域的长度、控制步长等,这些参数会影响MPC的性能。
🖼️ 关键图片

📊 实验亮点
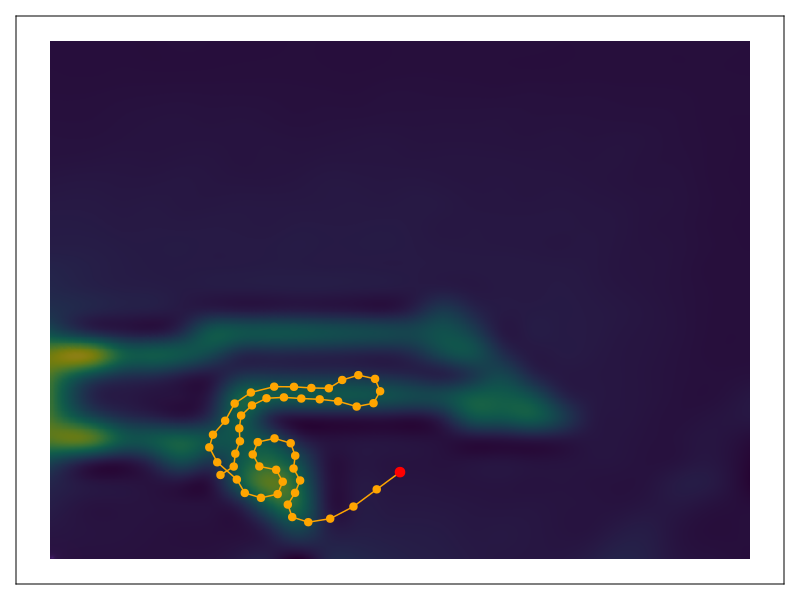
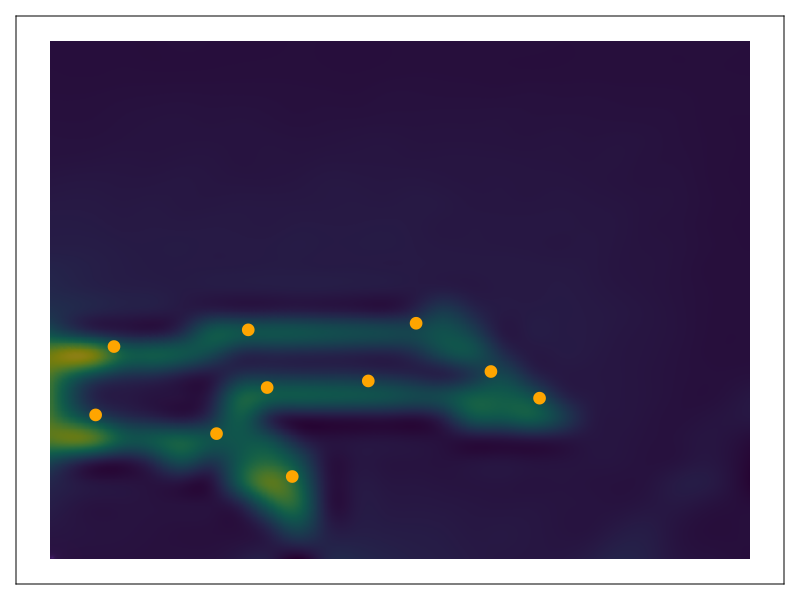
仿真结果表明,所提出的带有覆盖约束的MPC方法明显优于朴素的MPC方法。具体来说,使用TSP启发式初始化后的MPC方法,能够更快地覆盖目标区域,并获得更高的奖励。虽然论文中没有给出具体的性能数据,但强调了该方法在覆盖效率方面的显著提升。
🎯 应用场景
该研究成果可应用于多种实际场景,如搜索救援任务中,无人机或机器人需要在未知环境中搜索幸存者;农业领域中,无人机需要对农田进行喷洒或巡检;环境监测领域中,机器人需要在特定区域内收集环境数据。通过优化覆盖路径,可以提高任务效率,降低成本,并减少人工干预。
📄 摘要(原文)
This paper considers the application of Model Predictive Control (MPC) to a weighted coverage path planning (WCPP) problem. The problem appears in a wide range of practical applications, including search and rescue (SAR) missions. The basic setup is that one (or multiple) agents can move around a given search space and collect rewards from a given spatial distribution. Unlike an artificial potential field, each reward can only be collected once. In contrast to a Traveling Salesman Problem (TSP), the agent moves in a continuous space. Moreover, he is not obliged to cover all locations and/or may return to previously visited locations. The WCPP problem is tackled by a new Model Predictive Control (MPC) formulation with so-called Coverage Constraints (CCs). It is shown that the solution becomes more effective if the solver is initialized with a TSP-based heuristic. With and without this initialization, the proposed MPC approach clearly outperforms a naive MPC formulation, as demonstrated in a small simulation study.