Safety Filter Design for Articulated Frame Steering Vehicles In the Presence of Actuator Dynamics Using High-Order Control Barrier Functions
作者: Naeim Ebrahimi Toulkani, Reza Ghabcheloo
分类: eess.SY
发布日期: 2024-11-12 (更新: 2025-04-07)
💡 一句话要点
针对执行器动态的铰接转向车辆,提出基于高阶控制障碍函数(HOCBF)的安全滤波器设计
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 铰接转向车辆 安全滤波器 高阶控制障碍函数 二次规划 执行器动态
📋 核心要点
- 铰接转向车辆(AFS)常在人员附近作业,安全控制至关重要,但现有方法难以兼顾执行器动态。
- 提出一种基于高阶控制障碍函数(HOCBF)的安全滤波器,通过二次规划(QP)确保AFS车辆在仿射执行器动态下的安全性。
- 数值模拟验证了所提出的安全滤波器在AFS车辆运动学中的有效性,表明其能够保障车辆安全运行。
📝 摘要(中文)
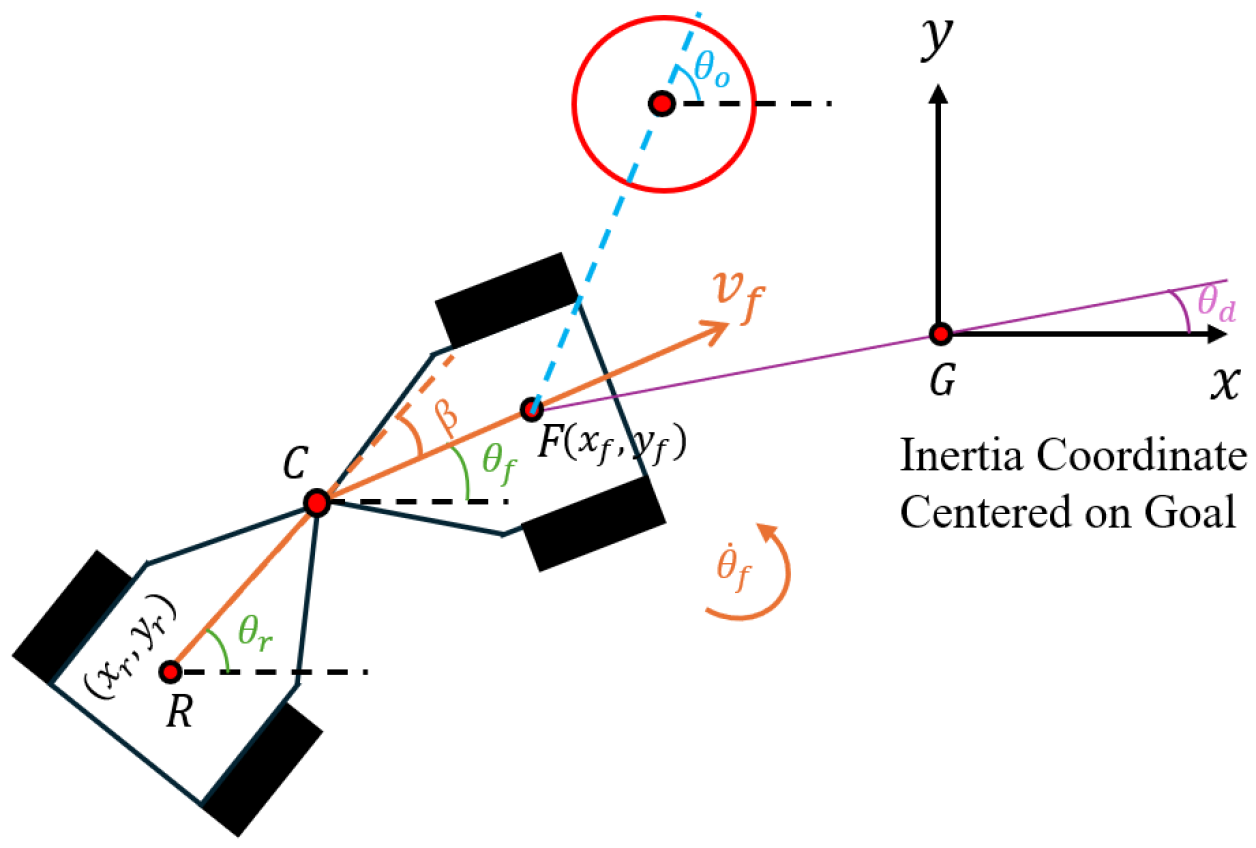
本文针对铰接转向车辆(AFS)的安全控制问题,提出了一种基于二次规划(QP)的安全滤波器设计方案。该方案旨在确保具有仿射执行器动态的AFS车辆运行的安全性。首先,推导了包含仿射执行器动态的AFS车辆通用运动方程。然后,引入了一种新颖的高阶控制障碍函数(HOCBF),该函数对两个系统控制具有相同的相对阶数。最后,设计了一种参数自适应HOCBF(PACBF)和一个始终可行的、基于QP的安全滤波器。AFS车辆运动学的数值模拟验证了该方法的有效性。
🔬 方法详解
问题定义:论文旨在解决铰接转向车辆(AFS)在存在执行器动态的情况下,如何设计安全控制器的问题。现有的控制方法可能无法充分考虑执行器动态的影响,导致车辆在运行过程中存在安全风险,尤其是在人员附近作业时。因此,需要设计一种能够保证车辆安全运行的安全滤波器。
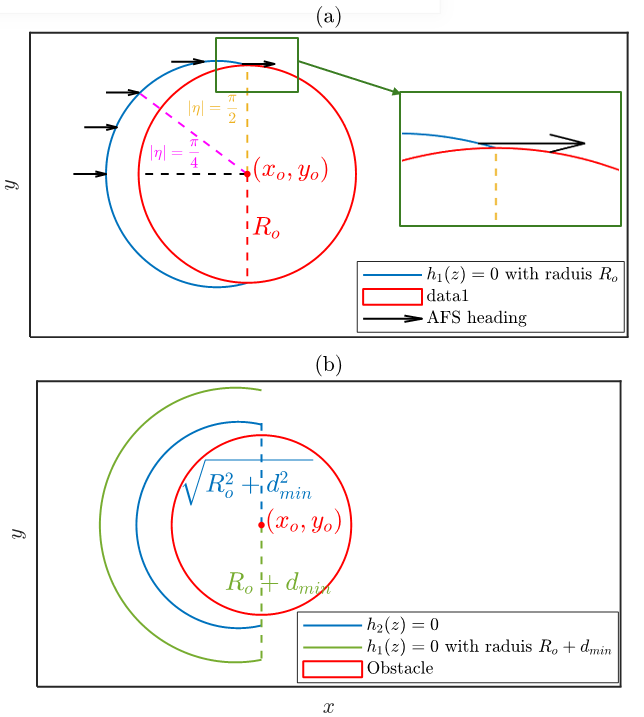
核心思路:论文的核心思路是利用高阶控制障碍函数(HOCBF)来构建一个安全滤波器。HOCBF能够显式地定义安全区域,并确保车辆的状态始终保持在该区域内。通过将HOCBF与二次规划(QP)相结合,可以设计出一个始终可行的安全滤波器,该滤波器能够在满足安全约束的同时,尽可能地接近期望的控制输入。
技术框架:该方法的技术框架主要包括以下几个步骤:1) 推导包含仿射执行器动态的AFS车辆通用运动方程;2) 设计一种新颖的HOCBF,该HOCBF对两个系统控制具有相同的相对阶数;3) 设计一种参数自适应HOCBF(PACBF),以适应车辆运行过程中的不确定性;4) 构建一个基于QP的安全滤波器,该滤波器以期望的控制输入为目标,以HOCBF导出的安全约束为约束条件,求解出一个满足安全约束的控制输入。
关键创新:该论文的关键创新在于提出了一种新颖的HOCBF,该HOCBF对两个系统控制具有相同的相对阶数。这种设计使得安全滤波器的设计更加简单,并且能够更好地处理执行器动态的影响。此外,论文还提出了一种参数自适应HOCBF(PACBF),该PACBF能够适应车辆运行过程中的不确定性,从而提高安全滤波器的鲁棒性。
关键设计:HOCBF的设计是关键。论文中HOCBF的具体形式未知,但强调了其对两个系统控制具有相同的相对阶数。PACBF的设计需要考虑如何根据车辆的运行状态来调整HOCBF的参数,以适应不确定性。QP的约束条件由HOCBF导出,目标函数通常是使实际控制输入尽可能接近期望控制输入。具体参数设置和损失函数细节未知。
🖼️ 关键图片

📊 实验亮点
论文通过数值模拟验证了所提出的安全滤波器在AFS车辆运动学中的有效性。具体性能数据未知,但结果表明该方法能够确保车辆在满足安全约束的前提下,尽可能地接近期望的运动轨迹。与没有安全滤波器的控制方法相比,该方法能够显著提高车辆运行的安全性。
🎯 应用场景
该研究成果可应用于各种重型工业场景中使用的铰接转向车辆,例如矿用卡车、装载机等。通过应用该安全滤波器,可以有效降低车辆在运行过程中发生事故的风险,保障操作人员的安全,提高生产效率。未来,该方法还可以扩展到其他类型的车辆和机器人系统。
📄 摘要(原文)
Articulated Frame Steering (AFS) vehicles are widely used in heavy-duty industries, where they often operate near operators and laborers. Therefore, designing safe controllers for AFS vehicles is essential. In this paper, we develop a Quadratic Program (QP)-based safety filter that ensures feasibility for AFS vehicles with affine actuator dynamics. To achieve this, we first derive the general equations of motion for AFS vehicles, incorporating affine actuator dynamics. We then introduce a novel High-Order Control Barrier Function (HOCBF) candidate with equal relative degrees for both system controls. Finally, we design a Parametric Adaptive HOCBF (PACBF) and an always-feasible, QP-based safety filter. Numerical simulations of AFS vehicle kinematics demonstrate the effectiveness of our approach.