Autonomous Industrial Control using an Agentic Framework with Large Language Models
作者: Javal Vyas, Mehmet Mercangöz
分类: cs.MA, eess.SY
发布日期: 2024-11-08
💡 一句话要点
提出基于LLM Agent的自主工业控制框架,解决动态环境下容错与控制问题
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 自主控制 大型语言模型 工业自动化 智能代理 容错机制
📋 核心要点
- 化工装置迈向完全自主化,在动态和不可预测环境中有效处理故障和控制变得至关重要。
- 论文提出一种基于LLM的自主控制代理框架,通过验证和重提示机制,实现自主管理和容错。
- 通过温度控制实验验证了该方法在微控制器设备上的有效性,为复杂工业环境的自适应控制奠定基础。
📝 摘要(中文)
本文提出了一种创新的工业自动化方法,引入了基于大型语言模型(LLM)的自主控制代理,并采用验证和重提示架构。该代理系统由操作员、验证器和重提示器代理组成,能够自主管理控制任务,适应不可预见的扰动,无需人工干预。通过验证和重提示架构,该框架允许代理从错误中恢复,并持续改进实时工业场景中的决策。我们假设这种机制将提高各种LLM的性能和可靠性,为能够处理意外挑战的完全自主系统铺平道路,从而为复杂工业环境中的稳健、自适应控制开辟道路。为了证明该概念的有效性,我们创建了一个简单的案例研究,涉及嵌入在微控制器设备上的温度控制实验,验证了所提出的方法。
🔬 方法详解
问题定义:现有化工厂的自动化程度不断提高,但面对动态、不可预测的环境,如何有效地处理故障和实现自主控制仍然是一个挑战。传统的控制系统在面对突发扰动时,往往需要人工干预,效率较低且容易出错。因此,需要一种能够自主适应环境变化并进行容错的控制系统。
核心思路:本文的核心思路是利用大型语言模型(LLM)的强大推理和决策能力,构建一个由多个智能代理组成的自主控制系统。该系统通过验证和重提示机制,使代理能够从错误中恢复,并持续改进决策,从而实现对工业过程的自主管理和控制。
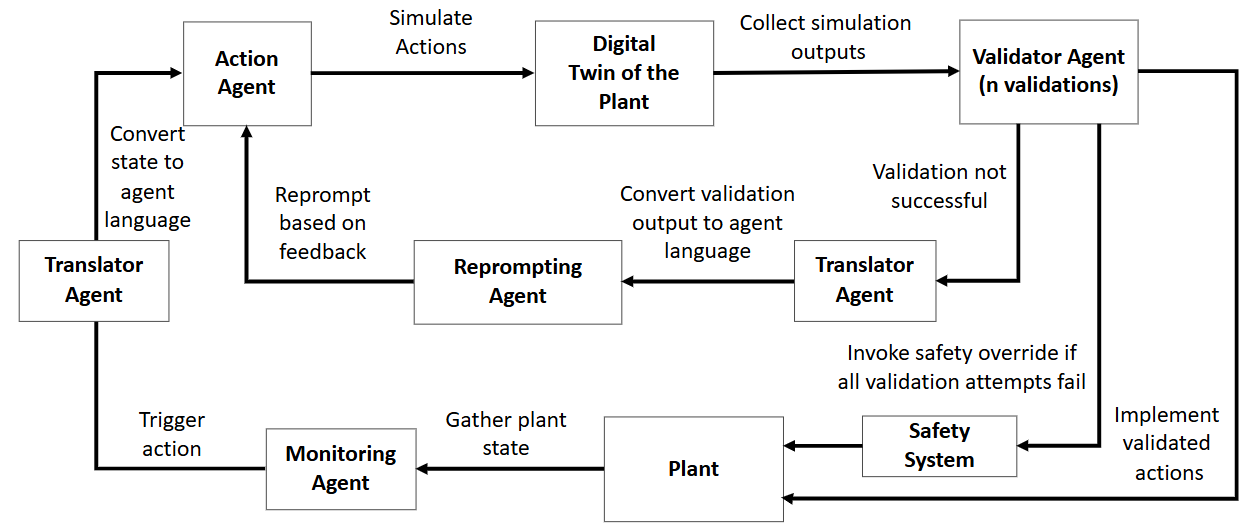
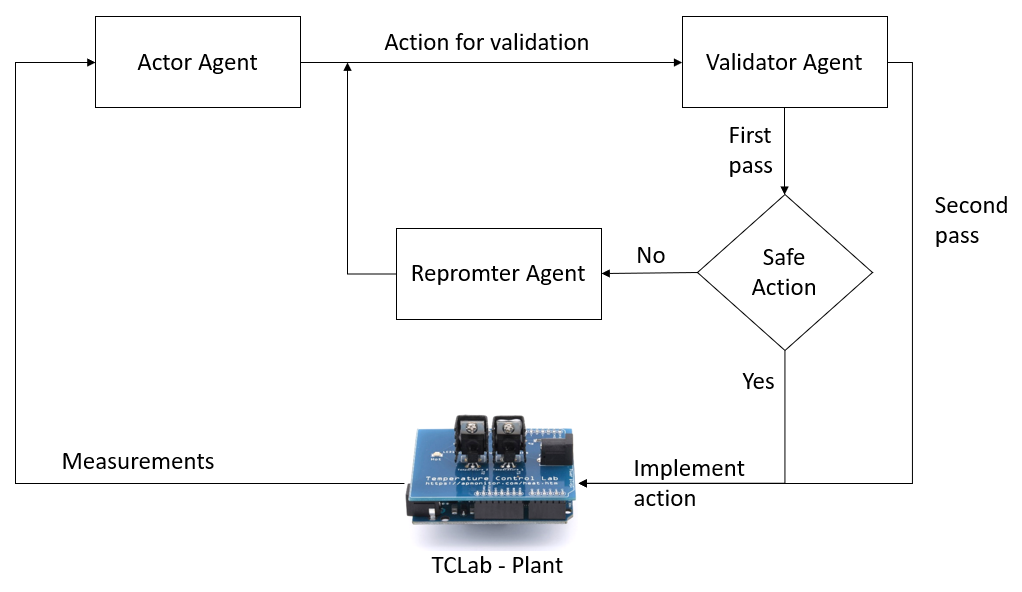
技术框架:该系统包含三个主要代理:操作员代理(Operator Agent)、验证器代理(Validator Agent)和重提示器代理(Reprompter Agent)。操作员代理负责执行控制任务,验证器代理负责评估操作员代理的输出,重提示器代理负责根据验证结果对操作员代理进行指导和改进。整个流程如下:操作员代理生成控制指令 -> 验证器代理评估指令的有效性 -> 如果指令无效,重提示器代理根据验证结果对操作员代理进行重提示 -> 操作员代理根据重提示信息重新生成控制指令 -> 循环上述过程,直到生成有效的控制指令。
关键创新:该方法最重要的创新点在于引入了验证和重提示机制,使LLM代理能够从错误中学习并不断改进决策。这种机制类似于人类的自我反思和学习过程,可以显著提高LLM代理的鲁棒性和适应性。与传统的控制系统相比,该方法无需人工干预,能够自主处理各种突发情况。
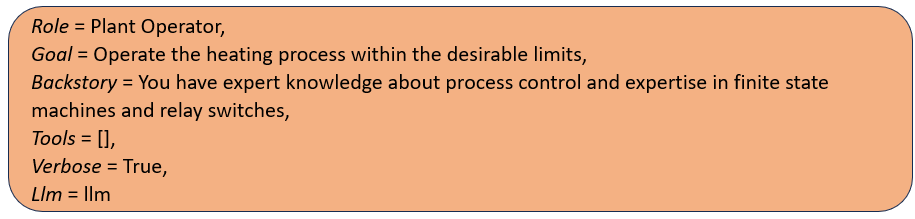
关键设计:论文中没有详细描述具体的参数设置、损失函数或网络结构等技术细节。但是,验证器代理的设计至关重要,需要能够准确评估操作员代理的输出,并提供有效的重提示信息。重提示器代理的设计也需要考虑如何有效地利用验证结果来指导操作员代理的改进。具体的实现方式可能包括使用不同的LLM模型、调整提示词的格式和内容、以及引入强化学习等技术。
🖼️ 关键图片
📊 实验亮点
论文通过一个简单的温度控制实验验证了所提出方法的有效性。实验结果表明,该方法能够使LLM代理自主地控制温度,并在面对扰动时进行有效调整。虽然论文没有提供具体的性能数据和对比基线,但该实验证明了该方法在实际应用中的可行性。
🎯 应用场景
该研究成果可应用于各种工业自动化场景,例如化工厂、发电厂、智能制造等。通过部署该自主控制系统,可以显著提高生产效率、降低运营成本、减少人为错误,并提高系统的安全性和可靠性。未来,该技术有望实现完全自主化的工业生产,推动工业智能化发展。
📄 摘要(原文)
As chemical plants evolve towards full autonomy, the need for effective fault handling and control in dynamic, unpredictable environments becomes increasingly critical. This paper proposes an innovative approach to industrial automation, introducing validation and reprompting architectures utilizing large language model (LLM)-based autonomous control agents. The proposed agentic system, comprising of operator, validator, and reprompter agents, enables autonomous management of control tasks, adapting to unforeseen disturbances without human intervention. By utilizing validation and reprompting architectures, the framework allows agents to recover from errors and continuously improve decision-making in real-time industrial scenarios. We hypothesize that this mechanism will enhance performance and reliability across a variety of LLMs, offering a path toward fully autonomous systems capable of handling unexpected challenges, paving the way for robust, adaptive control in complex industrial environments. To demonstrate the concept's effectiveness, we created a simple case study involving a temperature control experiment embedded on a microcontroller device, validating the proposed approach.