Data-Driven Min-Max MPC for LPV Systems with Unknown Scheduling Signal
作者: Yifan Xie, Julian Berberich, Felix Brändle, Frank Allgöwer
分类: eess.SY
发布日期: 2024-11-08
💡 一句话要点
针对未知调度信号LPV系统,提出数据驱动的Min-Max MPC方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 数据驱动控制 模型预测控制 线性参数变化系统 未知调度信号 Min-Max MPC
📋 核心要点
- 现有数据驱动LPV控制方法通常需要已知调度信号,但在实际应用中,调度信号往往难以获取。
- 该论文提出一种数据驱动的min-max MPC方法,无需已知调度信号,仅利用输入-状态数据即可实现控制。
- 通过仿真验证了该方法的有效性,证明了其在未知调度信号下的递归可行性、闭环稳定性和约束满足能力。
📝 摘要(中文)
本文提出了一种针对线性参数变化(LPV)系统的数据驱动的min-max模型预测控制(MPC)方案。与现有的数据驱动LPV控制方法不同,我们假设调度信号在离线数据收集和在线系统运行期间是未知的。假设调度信号的二次矩阵不等式(QMI)描述,我们开发了一种新颖的数据驱动方法,仅使用输入-状态数据来表征一致的系统矩阵。所提出的数据驱动min-max MPC最小化了一致系统矩阵集合和满足QMI的所有调度信号上的最坏情况成本的可处理上界。如果初始时刻可行,则所提出的方法保证递归可行性、闭环指数稳定性和约束满足。我们通过仿真验证了该方法的有效性。
🔬 方法详解
问题定义:论文旨在解决线性参数变化(LPV)系统在调度信号未知情况下的模型预测控制(MPC)问题。现有的数据驱动LPV控制方法通常依赖于已知的调度信号,这在实际应用中是一个很大的限制,因为调度信号可能难以测量或获取。因此,如何在未知调度信号的情况下设计有效的LPV系统MPC控制器是一个重要的挑战。
核心思路:论文的核心思路是利用输入-状态数据来表征与系统一致的系统矩阵集合,并基于此构建一个min-max MPC。通过假设调度信号满足二次矩阵不等式(QMI),论文推导出了一种数据驱动的方法来描述这些一致的系统矩阵。然后,min-max MPC旨在最小化在这些一致的系统矩阵集合和满足QMI的所有调度信号上的最坏情况成本。
技术框架:该方法主要包含以下几个阶段:1) 数据收集:收集系统的输入-状态数据。2) 系统矩阵表征:利用收集到的数据,基于QMI假设,推导出一致的系统矩阵集合的数据驱动表征。3) Min-Max MPC设计:基于上述系统矩阵集合,设计一个min-max MPC,该MPC最小化最坏情况下的成本。4) 求解优化问题:在线求解min-max MPC的优化问题,得到控制输入。
关键创新:该论文的关键创新在于提出了一种在未知调度信号情况下,利用输入-状态数据来表征一致的系统矩阵集合的方法。与现有方法相比,该方法无需预先知道调度信号,从而扩展了数据驱动LPV控制的应用范围。此外,论文还提出了一种基于该表征的min-max MPC设计方法,保证了闭环系统的稳定性和约束满足。
关键设计:论文的关键设计包括:1) 假设调度信号满足QMI,这为系统矩阵的表征提供了理论基础。2) 推导了数据驱动的系统矩阵集合表征方法,该方法仅依赖于输入-状态数据。3) 设计了min-max MPC,通过最小化最坏情况下的成本,保证了系统的鲁棒性。具体的优化问题需要根据具体的系统和性能指标进行设计,例如选择合适的成本函数和约束条件。
🖼️ 关键图片

📊 实验亮点
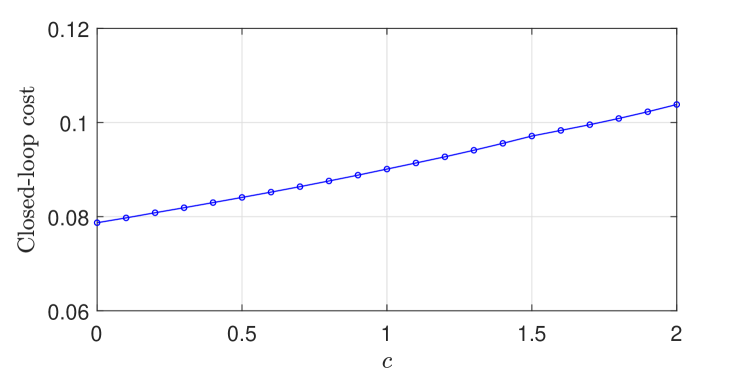
论文通过仿真验证了所提出方法的有效性。仿真结果表明,即使在调度信号未知的情况下,该方法也能保证闭环系统的递归可行性、指数稳定性和约束满足。具体的性能数据(如跟踪误差、控制输入范围等)未在摘要中给出,但强调了该方法在未知调度信号下的鲁棒控制能力。
🎯 应用场景
该研究成果可应用于各种需要对线性参数变化系统进行控制的领域,例如航空航天、汽车工程、机器人等。特别是在调度信号难以测量或获取的场景下,该方法具有重要的应用价值。例如,在飞行器控制中,气动参数可能随飞行状态变化,但难以精确测量,该方法可用于设计鲁棒的飞行控制系统。
📄 摘要(原文)
This paper presents a data-driven min-max model predictive control (MPC) scheme for linear parameter-varying (LPV) systems. Contrary to existing data-driven LPV control approaches, we assume that the scheduling signal is unknown during offline data collection and online system operation. Assuming a quadratic matrix inequality (QMI) description for the scheduling signal, we develop a novel data-driven characterization of the consistent system matrices using only input-state data. The proposed data-driven min-max MPC minimizes a tractable upper bound on the worst-case cost over the consistent system matrices set and over all scheduling signals satisfying the QMI. The proposed approach guarantees recursive feasibility, closed-loop exponential stability and constraint satisfaction if it is feasible at the initial time. We demonstrate the effectiveness of the proposed method in simulation.