Distributed Attack-Resilient Platooning Against False Data Injection
作者: Lorenzo Lyons, Manuel Boldrer, Laura Ferranti
分类: eess.SY
发布日期: 2024-11-07 (更新: 2025-06-16)
💡 一句话要点
提出一种分布式抗攻击车辆队列控制策略,解决虚假数据注入下的安全问题。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 车辆队列控制 分布式控制 抗攻击 虚假数据注入 卡尔曼滤波 自动驾驶 智能交通系统
📋 核心要点
- 现有车辆队列控制方法在面对虚假数据注入攻击时,难以保证车辆间的安全距离和队列稳定性。
- 论文提出一种分布式CACC方案,结合传感器和通信信息,限制通信控制权限,降低攻击影响。
- 通过仿真和实际机器人实验验证,该方法在抗攻击和队列控制方面优于现有MPC和鲁棒控制方案。
📝 摘要(中文)
本文提出了一种新颖的分布式车辆队列控制与协调策略。我们提出了一种分布式的前车-后车跟随(predecessor-follower)CACC方案,该方案允许选择任意小的车间距,同时保证即使在通信信道上存在未被检测到的网络攻击(如虚假数据注入)的情况下,也不会发生追尾碰撞。CACC策略的安全保证是通过结合一个基于传感器的ACC策略(显式考虑了执行器饱和)和一个基于通信的预测项(对其控制权限具有状态相关的限制)来获得的,从而控制了不可靠通信信道的影响。然而,未被检测到的攻击仍然可能会降低队列的性能。为了缓解这种情况,我们提出了一种基于卡尔曼观测器的定制攻击检测算法,该算法最初会触发从CACC策略到ACC策略的切换。随后,通过依赖于一个高级协调器,我们的策略允许通过重新配置队列拓扑本身来隔离受损车辆。协调器还可以处理合并和拆分请求。我们在广泛的仿真研究中将我们的算法与最先进的分布式MPC方案和鲁棒控制方案进行了比较。此外,我们在一个真实的系统中,即一组缩小的汽车机器人上,在实践中广泛地测试了我们的完整方法。此外,我们分享了运行模拟和机器人实验的代码。
🔬 方法详解
问题定义:论文旨在解决车辆队列在遭受虚假数据注入攻击时,如何保证队列的安全性和性能的问题。现有的车辆队列控制方法,特别是依赖通信的CACC方案,容易受到攻击者的恶意篡改,导致车辆间距过小,甚至发生碰撞。传统的安全机制可能无法有效检测所有攻击,从而使队列面临风险。
核心思路:论文的核心思路是设计一种分布式的、具有抗攻击能力的CACC方案。该方案结合了基于传感器的ACC策略和基于通信的预测项,并对通信控制权限进行状态相关的限制,从而降低了攻击的影响。此外,还引入了基于卡尔曼滤波的攻击检测算法和高级协调器,用于检测和隔离受损车辆,并重新配置队列拓扑。
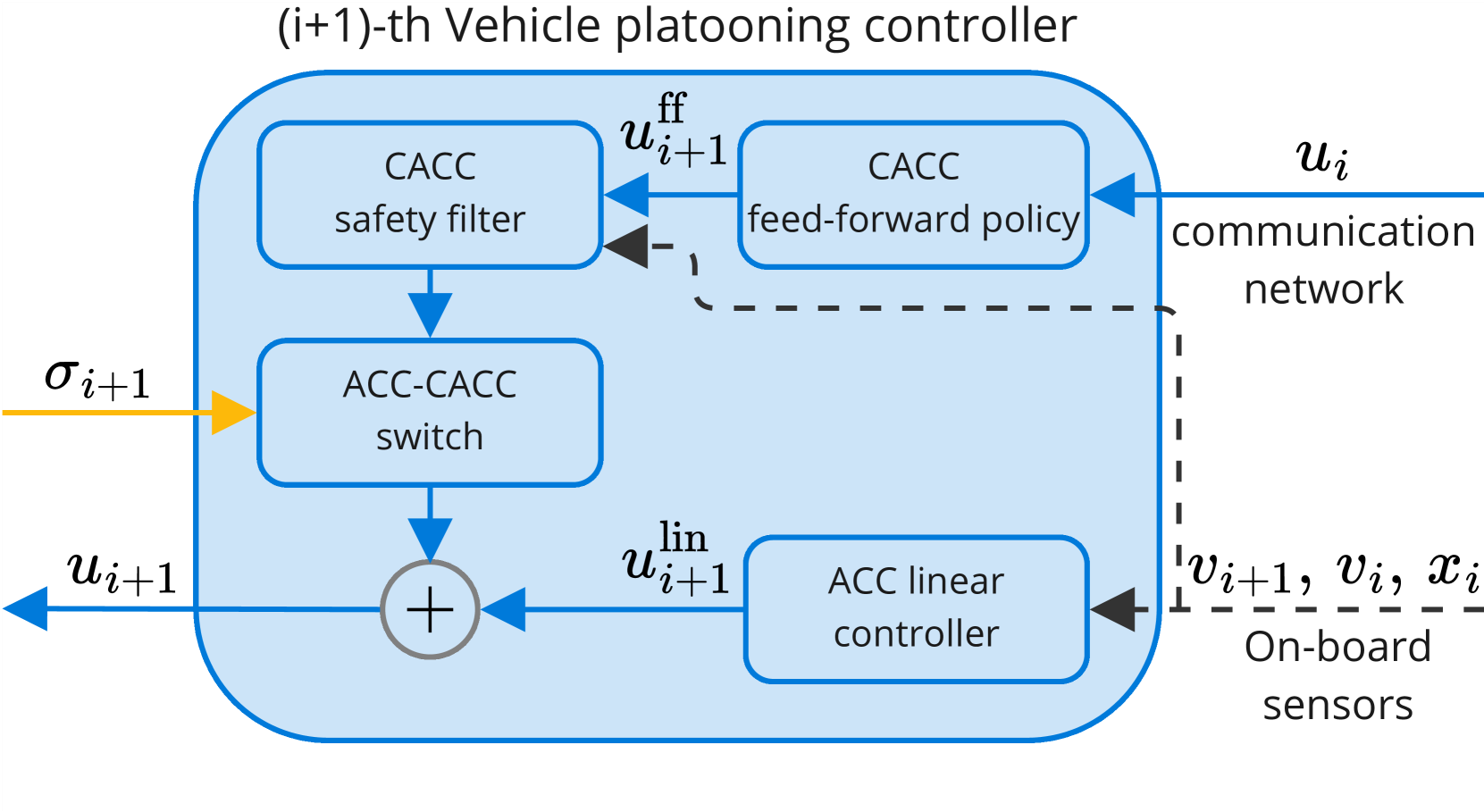
技术框架:整体框架包括以下几个主要模块:1) 分布式CACC控制器:结合传感器和通信信息,实现车辆间的协同控制;2) 基于传感器的ACC策略:作为安全保障,显式考虑执行器饱和;3) 基于通信的预测项:具有状态相关的控制权限限制,降低攻击影响;4) 卡尔曼滤波攻击检测器:检测虚假数据注入攻击;5) 高级协调器:负责队列拓扑的重新配置,隔离受损车辆,处理合并和拆分请求。
关键创新:论文的关键创新在于:1) 提出了一种具有状态相关控制权限限制的CACC方案,有效降低了虚假数据注入攻击的影响;2) 设计了一种基于卡尔曼滤波的攻击检测算法,能够及时检测到攻击并触发安全机制;3) 引入了高级协调器,实现了队列拓扑的动态重构,从而隔离受损车辆,保证了队列的整体安全性。
关键设计:CACC控制器采用前车-后车跟随结构,车辆根据前车的状态和自身状态进行控制。基于通信的预测项的控制权限限制是根据车辆的状态动态调整的,以防止攻击者通过篡改通信信息来过度影响车辆的控制。卡尔曼滤波攻击检测器利用车辆状态的冗余信息来检测虚假数据注入攻击。高级协调器使用图论方法来描述队列拓扑,并根据攻击检测结果和合并/拆分请求来重新配置队列拓扑。
🖼️ 关键图片


📊 实验亮点
论文通过仿真和实际机器人实验验证了所提出方法的有效性。仿真结果表明,该方法在抗攻击性能方面优于传统的分布式MPC方案和鲁棒控制方案。实际机器人实验进一步验证了该方法在真实环境中的可行性和有效性。实验结果表明,该方法能够在虚假数据注入攻击下保持队列的稳定性和安全性,并能够有效地检测和隔离受损车辆。
🎯 应用场景
该研究成果可应用于自动驾驶车辆队列、智能交通系统等领域,提高车辆队列在复杂和不安全环境下的安全性和可靠性。通过抗攻击设计,可以有效防止恶意攻击者对车辆队列的干扰,保障交通运输的安全和效率。该技术对于提升自动驾驶系统的鲁棒性和安全性具有重要意义。
📄 摘要(原文)
This paper presents a novel distributed vehicle platooning control and coordination strategy. We propose a distributed predecessor-follower CACC scheme that allows to choose an arbitrarily small inter-vehicle distance while guaranteeing no rear-end collisions occur, even in the presence of undetected cyber-attacks on the communication channels such as false data injection. The safety guarantees of the CACC policy are derived by combining a sensor-based ACC policy that explicitly accounts for actuator saturation, and a communication-based predictive term that has state-dependent limits on its control authority, thus containing the effects of an unreliable communication channel. An undetected attack may still however be able to degrade platooning performance. To mitigate it, we propose a tailored Kalman observer-based attack detection algorithm that initially triggers a switch from the CACC policy to the ACC policy. Subsequently, by relying on a high-level coordinator, our strategy allows to isolate a compromised vehicle from the platoon formation by reconfiguring the platoon topology itself. The coordinator can also handle merging and splitting requests. We compare our algorithm in an extensive simulation study against a state of the art distributed MPC scheme and a robust control scheme. We additionally extensively test our full method in practice on a real system, a team of scaled-down car-like robots. Furthermore, we share the code to run both the simulations and robotic experiments.