Constrained Trajectory Optimization for Hybrid Dynamical Systems
作者: Pietro Noah Crestaz, Gokhan Alcan, Ville Kyrki
分类: eess.SY
发布日期: 2024-10-30 (更新: 2025-10-23)
备注: 6 pages 4 figures
💡 一句话要点
针对混合动力系统的约束轨迹优化,扩展Hybrid iLQR方法以处理状态和输入约束。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 混合动力系统 轨迹优化 约束优化 iLQR 增广拉格朗日法 离散障碍状态法 机器人 运动规划
📋 核心要点
- 混合动力系统规划控制面临约束挑战,如避障、状态边界和驱动限制,现有方法难以兼顾效率和可行性。
- 扩展Hybrid iLQR方法,引入离散障碍状态法和增广拉格朗日法,在间接优化框架下处理约束,保持计算效率。
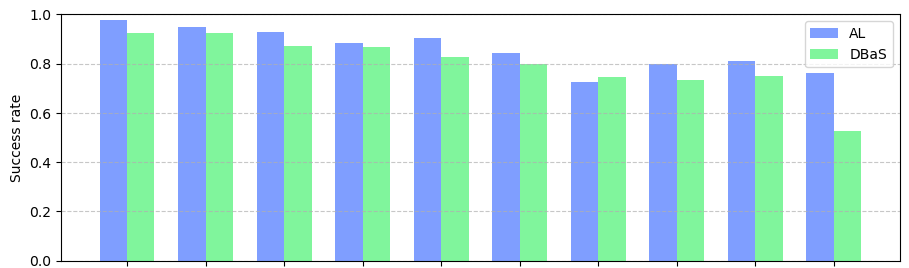
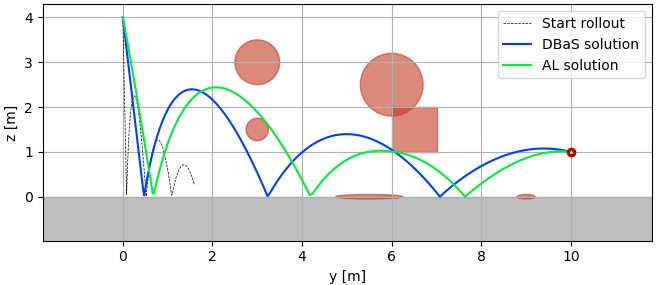
- 仿真结果表明,离散障碍状态法计算效率高,增广拉格朗日法在复杂场景和不可行初始轨迹下性能更优。
📝 摘要(中文)
混合动力系统在规划和控制方面面临重大挑战,尤其是在存在障碍物规避、状态边界和驱动限制等额外约束时。本文扩展了最近提出的Hybrid iLQR方法,使其能够在间接优化框架内处理状态和输入约束,旨在保持计算效率并确保动态可行性。具体而言,我们将两种约束处理机制(离散障碍状态法和增广拉格朗日法)整合到Hybrid iLQR中。通过各种操作场景下的综合仿真,评估并比较了这些扩展方法在收敛性和处理不可行初始轨迹方面的性能。结果表明,虽然离散障碍状态法在计算上更有效,但增广拉格朗日法在具有不可行初始轨迹的复杂和真实场景中表现更好。
🔬 方法详解
问题定义:论文旨在解决混合动力系统在复杂约束条件下的轨迹优化问题。现有方法在处理此类问题时,往往难以在计算效率和动态可行性之间取得平衡,尤其是在初始轨迹不可行的情况下,收敛性会受到影响。此外,显式地处理约束通常会导致计算复杂度显著增加。
核心思路:论文的核心思路是将约束处理机制融入到Hybrid iLQR框架中,利用其原有的高效优化能力,同时通过离散障碍状态法和增广拉格朗日法来处理状态和输入约束。这样既能保证动态可行性,又能尽量减少计算负担。通过比较两种约束处理机制的性能,为不同场景选择合适的方案。
技术框架:整体框架基于Hybrid iLQR,主要包含以下几个阶段:1) 系统动力学建模,包括连续和离散状态的转换;2) 轨迹优化,利用iLQR算法迭代求解最优控制序列;3) 约束处理,分别采用离散障碍状态法和增广拉格朗日法来施加约束;4) 仿真验证,在不同场景下评估算法性能。
关键创新:关键创新在于将两种不同的约束处理方法(离散障碍状态法和增广拉格朗日法)集成到Hybrid iLQR框架中,并对它们的性能进行了对比分析。这为解决混合动力系统约束轨迹优化问题提供了更灵活的选择,并揭示了不同方法在不同场景下的适用性。
关键设计:离散障碍状态法通过在状态空间中设置障碍来避免违反约束,其关键在于障碍的形状和大小的设计,以及如何将其融入到iLQR的成本函数中。增广拉格朗日法通过引入拉格朗日乘子和惩罚项来处理约束,关键在于拉格朗日乘子的更新策略和惩罚因子的选择,以保证收敛性和约束满足。
🖼️ 关键图片
📊 实验亮点
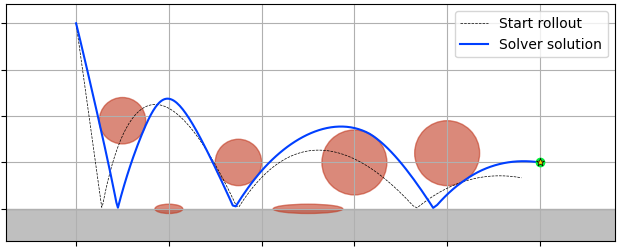
实验结果表明,在计算效率方面,离散障碍状态法优于增广拉格朗日法。然而,在处理具有不可行初始轨迹的复杂场景时,增广拉格朗日法表现出更好的收敛性和约束满足能力。具体而言,在某些场景下,增广拉格朗日法能够成功找到可行解,而离散障碍状态法则无法收敛。
🎯 应用场景
该研究成果可应用于机器人运动规划、自动驾驶、航空航天等领域,尤其是在复杂环境中需要考虑多种约束的场景下。例如,无人机在城市环境中飞行时需要避开建筑物,同时满足动力学约束和能源限制。该方法可以帮助生成安全、高效的飞行轨迹,提高系统的自主性和可靠性。
📄 摘要(原文)
Hybrid dynamical systems pose significant challenges for effective planning and control, especially when additional constraints such as obstacle avoidance, state boundaries, and actuation limits are present. In this letter, we extend the recently proposed Hybrid iLQR method [1] to handle state and input constraints within an indirect optimization framework, aiming to preserve computational efficiency and ensure dynamic feasibility. Specifically, we incorporate two constraint handling mechanisms into the Hybrid iLQR: Discrete Barrier State and Augmented Lagrangian methods. Comprehensive simulations across various operational situations are conducted to evaluate and compare the performance of these extended methods in terms of convergence and their ability to handle infeasible starting trajectories. Results indicate that while the Discrete Barrier State approach is more computationally efficient, the Augmented Lagrangian method outperforms it in complex and real-world scenarios with infeasible initial trajectories.