Trajectory Optimization for Unknown Maneuvering Target Tracking with Bearing-only Measurements
作者: Yingbo Fu, Ziwen Yang, Liang Xu, Yi Guo, Shanying Zhu, Xinnping Guan
分类: eess.SY
发布日期: 2024-10-24 (更新: 2025-11-18)
期刊: Fu, Yingbo, et al. "Trajectory optimization for unknown maneuvering target tracking with bearing-only measurements." Ocean Engineering 343 (2026): 123308
DOI: 10.1016/j.oceaneng.2025.123308
💡 一句话要点
提出基于高斯过程的GBT框架,解决AUV仅利用方位角信息跟踪未知机动目标的问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 自主水下航行器 目标跟踪 方位角测量 高斯过程 轨迹优化
📋 核心要点
- 水下环境感知受限,仅依靠方位角信息跟踪未知机动目标极具挑战,现有方法难以有效应对目标运动的不确定性。
- 论文提出GBT框架,利用高斯过程在线学习目标运动,并结合方位角伪线性变换降低非线性影响,从而优化AUV轨迹。
- 实验结果表明,所提出的GBT框架在跟踪精度和不确定性降低方面优于现有方法,验证了其可行性和优越性。
📝 摘要(中文)
本文研究了自主水下航行器(AUV)在二维和三维空间中跟踪未知机动目标的轨迹优化问题。考虑到水下环境的感知能力限制,AUV只能获取目标的方位角测量值。本文提出了一种名为“基于高斯过程的方位角跟踪(GBT)”的框架,该框架集成了在线学习和规划。首先,提出了一种高斯过程学习方法,用于处理AUV未知的目标运动,其中引入了方位角测量的伪线性变换来解决方位角的非线性问题。然后,严格建立了基于概率的、依赖于方位角数据的跟踪误差界限。在此基础上,解析地获得了能够降低跟踪不确定性的最优期望方位角。最后,将轨迹优化问题公式化,并通过参数变换将其转化为一个易于求解的问题。数值算例以及与现有方法的比较验证了我们提出的框架的可行性和优越性能。
🔬 方法详解
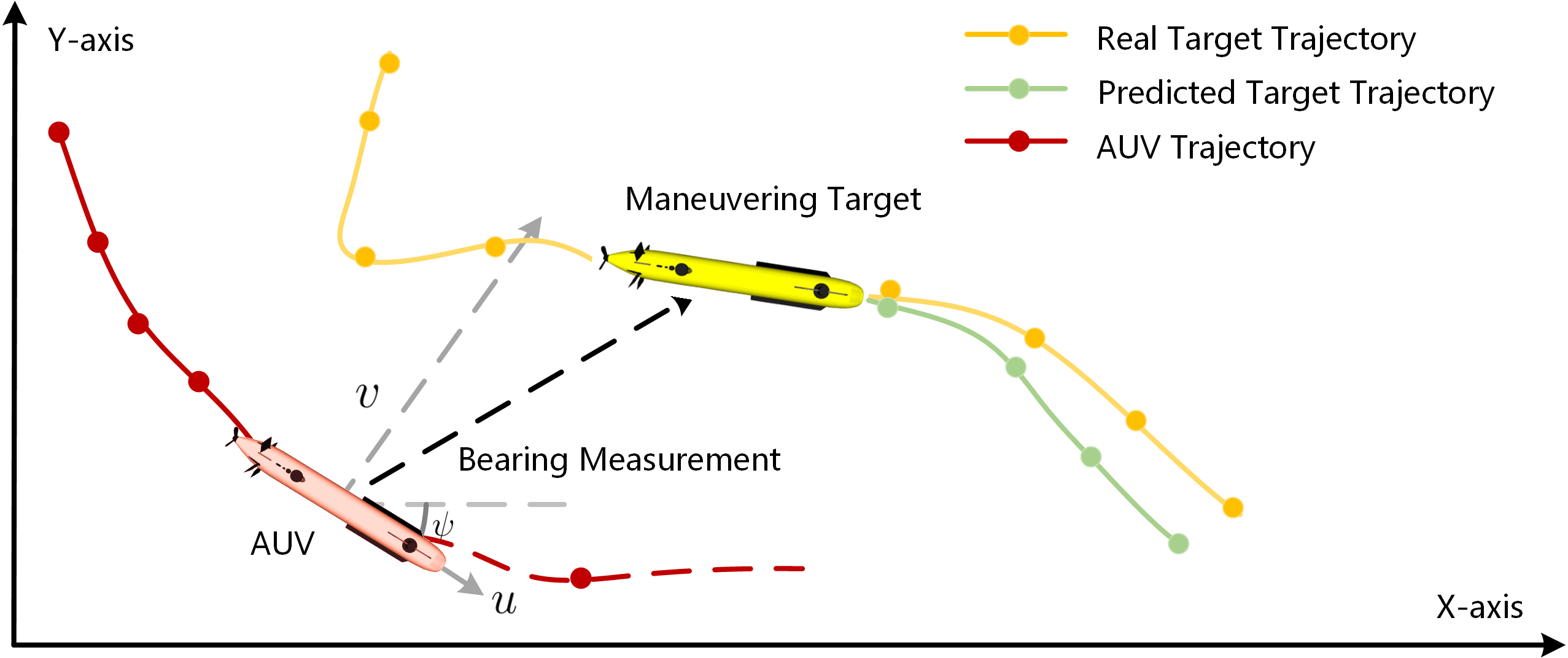
问题定义:论文旨在解决AUV在水下环境中,仅能获取目标方位角信息的情况下,如何有效地跟踪未知机动目标的问题。现有方法在处理方位角信息的非线性以及目标运动的不确定性方面存在不足,导致跟踪精度不高,鲁棒性较差。
核心思路:论文的核心思路是利用高斯过程(GP)来学习和预测目标的运动状态,并结合方位角信息的伪线性变换来降低非线性带来的影响。通过建立基于概率的跟踪误差界限,优化AUV的轨迹,使其能够更准确地跟踪目标。
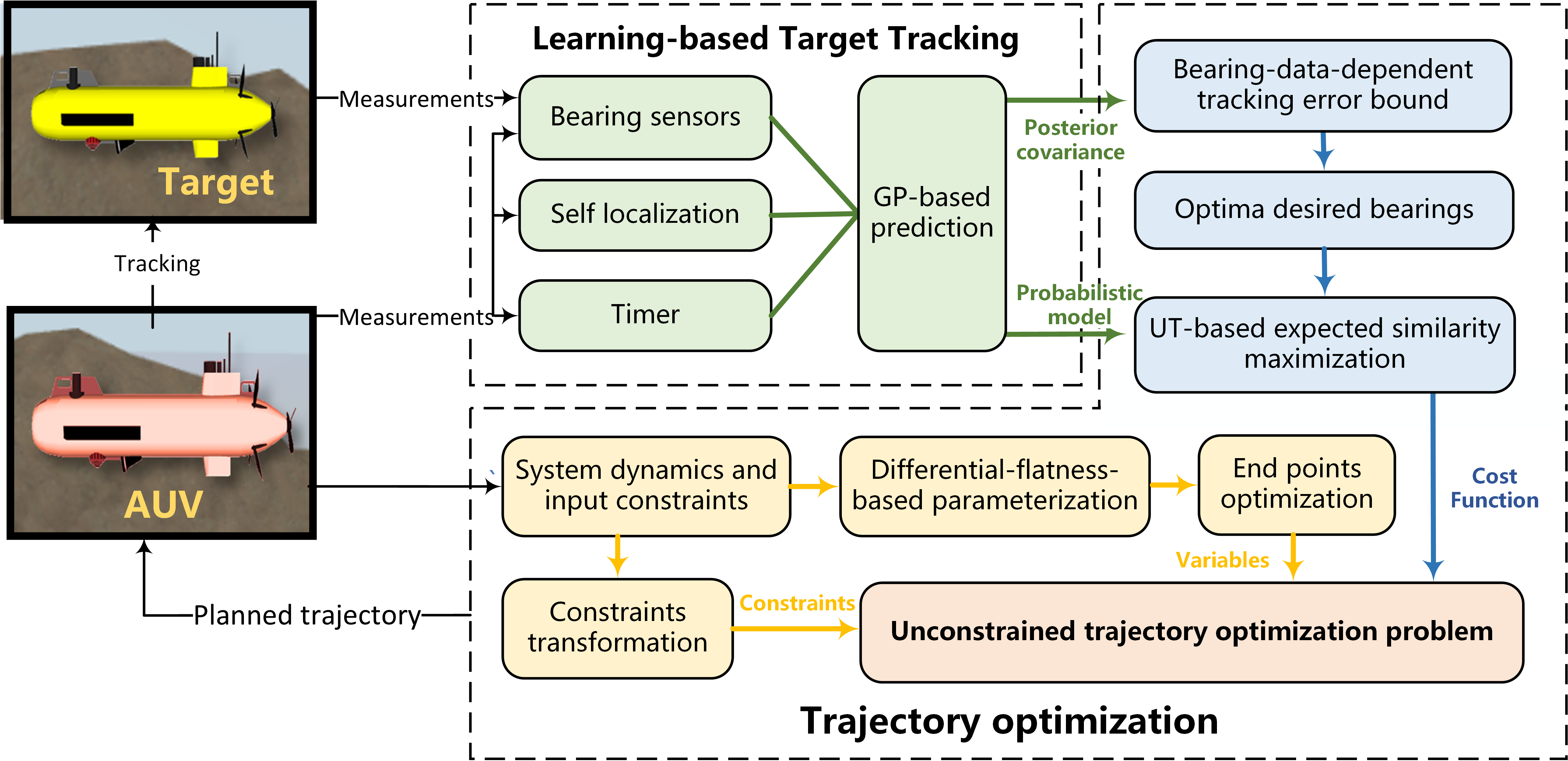
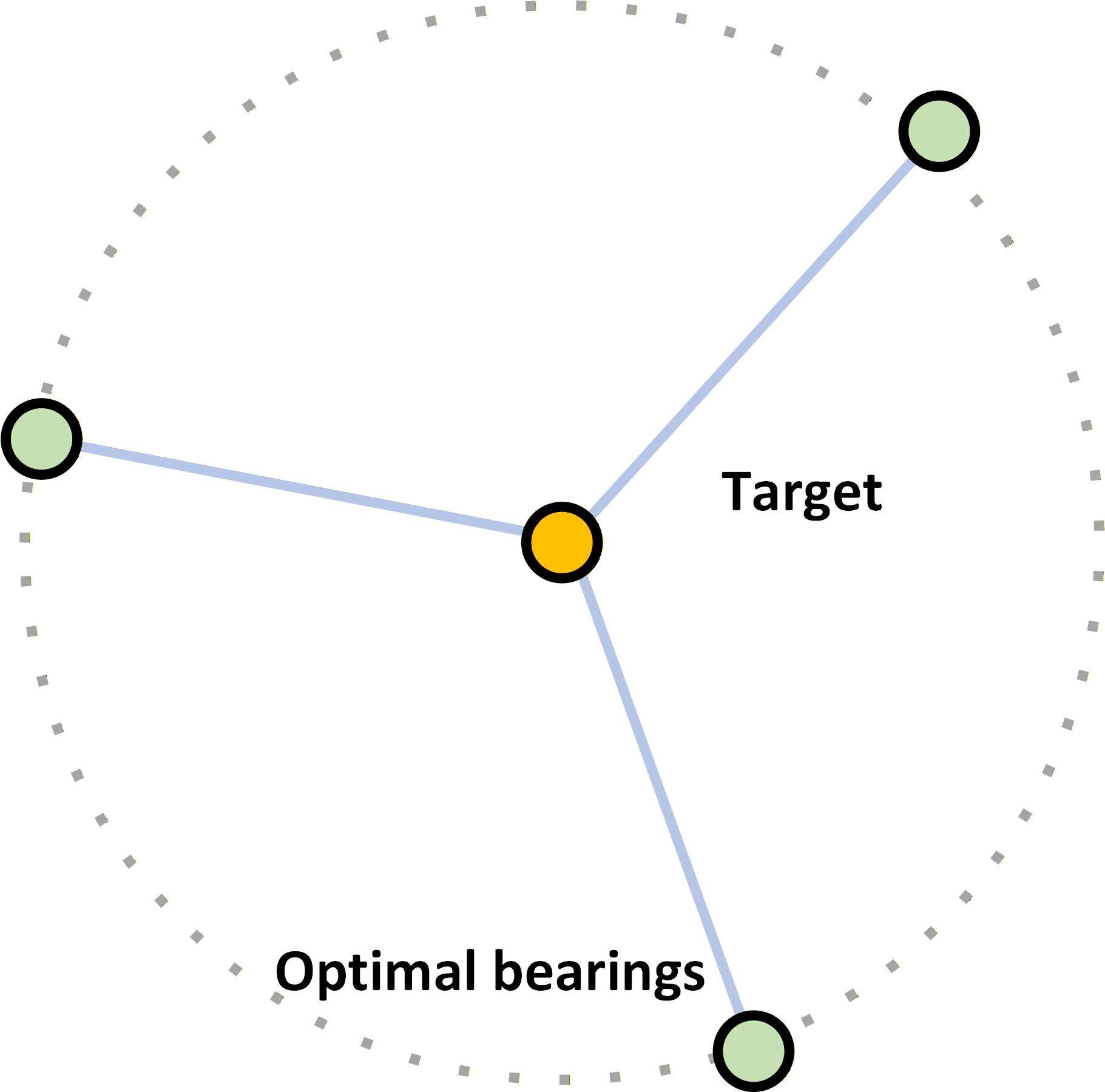
技术框架:GBT框架主要包含以下几个模块:1) 基于高斯过程的目标运动学习模块:利用在线采集的方位角信息,通过高斯过程回归学习目标的运动模型。2) 方位角伪线性变换模块:将非线性的方位角测量值转换为伪线性形式,以便更好地进行处理。3) 跟踪误差界限估计模块:基于高斯过程的预测结果和方位角测量值,估计跟踪误差的概率界限。4) 轨迹优化模块:根据跟踪误差界限,优化AUV的轨迹,使其能够降低跟踪不确定性。
关键创新:论文的关键创新在于:1) 提出了基于高斯过程的在线学习方法,能够有效地处理未知目标运动。2) 引入了方位角测量的伪线性变换,降低了方位角非线性带来的影响。3) 建立了基于概率的、依赖于方位角数据的跟踪误差界限,为轨迹优化提供了理论依据。
关键设计:高斯过程回归模型的核函数选择、伪线性变换的具体形式、跟踪误差界限的计算方法、轨迹优化问题的目标函数和约束条件等是关键的设计细节。例如,轨迹优化问题通常被转化为一个参数化的优化问题,以便于求解。损失函数的设计需要平衡跟踪精度和控制能量消耗。
🖼️ 关键图片
📊 实验亮点
论文通过数值算例验证了所提出的GBT框架的有效性。与现有方法相比,GBT框架在跟踪精度和不确定性降低方面表现出更优越的性能。具体而言,GBT框架能够显著降低跟踪误差,并提供更可靠的跟踪结果,尤其是在目标进行机动运动时,优势更加明显。
🎯 应用场景
该研究成果可应用于水下自主导航、水下目标跟踪、海洋环境监测等领域。例如,可用于AUV对水下移动目标的搜索、跟踪和监视,也可用于海洋科考中对特定海洋生物的跟踪研究。此外,该方法还可扩展到其他传感器受限的跟踪场景,具有重要的实际应用价值和潜在的商业前景。
📄 摘要(原文)
This paper studies trajectory optimization of an autonomous underwater vehicle (AUV) to track an unknown maneuvering target both in the 2D and 3D space. Due to the restrictions on sensing capabilities in the underwater scenario, the AUV is limited to collecting only bearing measurements to the target. A framework called {\it GP-based Bearing-only Tracking (GBT)} is proposed with integration of online learning and planning. First, a Gaussian process learning method is proposed for the AUV to handle unknown target motion, wherein pseudo linear transformation of bearing measurements is introduced to address nonlinearity of bearings. A probabilistic bearing-data-dependent bound on tracking error is then rigorously established. Based on it, optimal desired bearings that can reduce tracking uncertainty are obtained analytically. Finally, the trajectory optimization problem is formulated and transformed into an easily solved one with parametric transformation. Numerical examples and comparison with existing methods verify the feasibility and superior performance of our proposed framework.