Fast Physics-Informed Model Predictive Control Approximation for Lyapunov Stability
作者: Josue N. Rivera, Jianqi Ruan, XiaoLin Xu, Shuting Yang, Dengfeng Sun, Neera Jain
分类: eess.SY
发布日期: 2024-10-21
💡 一句话要点
提出基于物理信息的模型预测控制代理模型,加速稳定控制并降低计算需求。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 模型预测控制 代理模型 物理信息 李雅普诺夫稳定性 机器人控制
📋 核心要点
- 模型预测控制(MPC)计算量大,难以在计算资源有限的系统中实时应用。
- 提出PI-MPCS,通过物理信息约束和李雅普诺夫稳定性分析,学习MPC的控制策略。
- 实验表明,PI-MPCS在保证稳定性的前提下,显著降低了计算成本,并实现了快速精确的控制。
📝 摘要(中文)
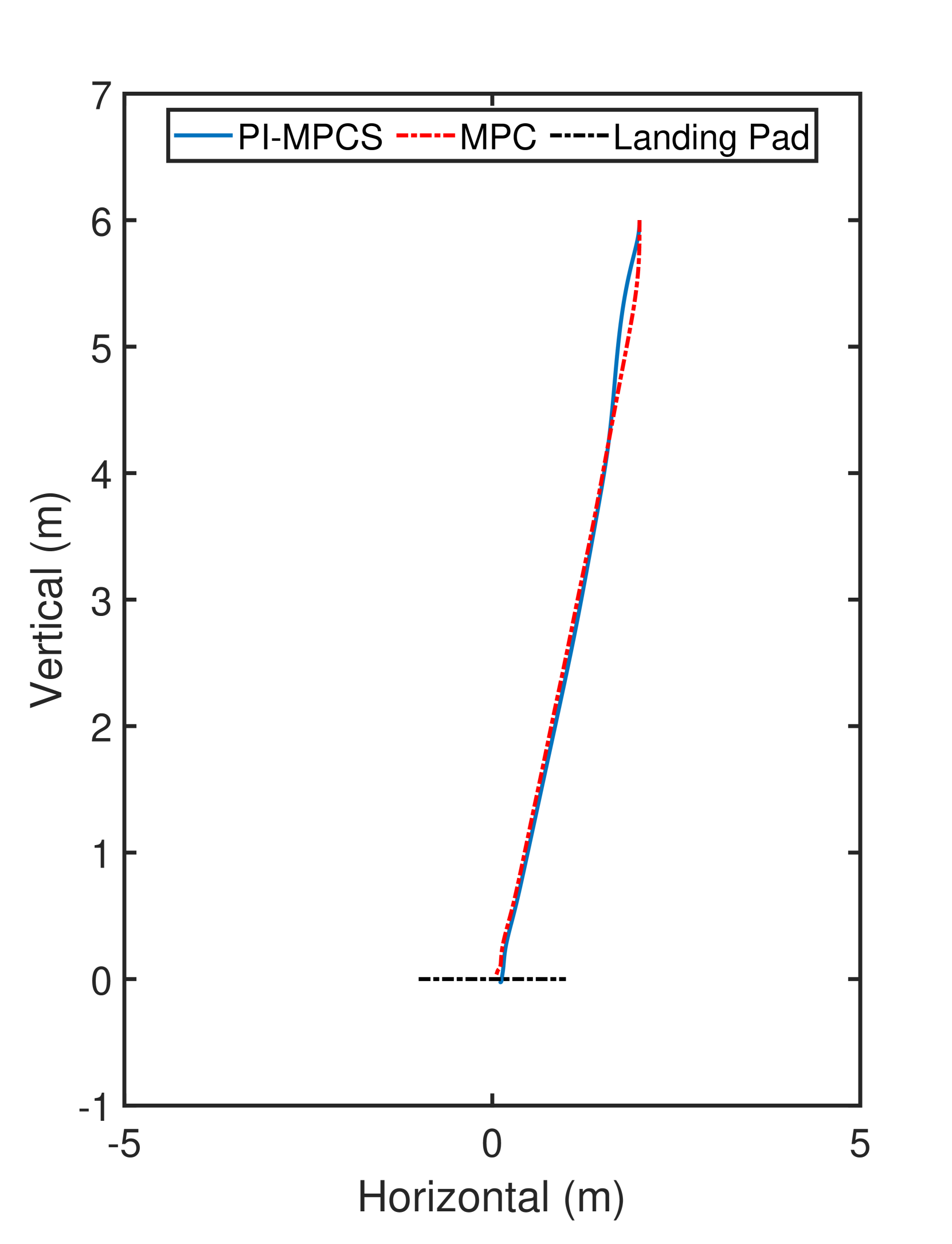
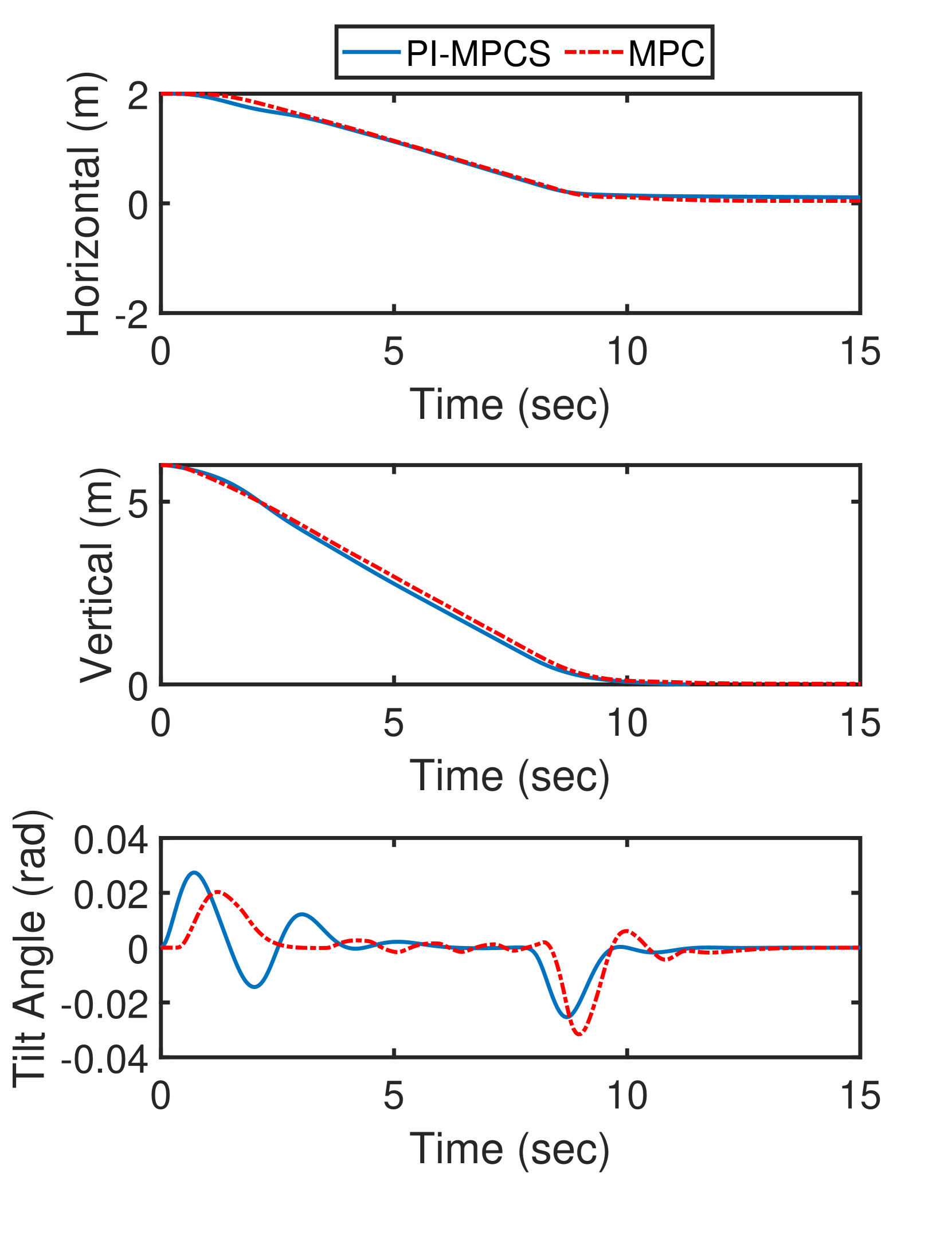
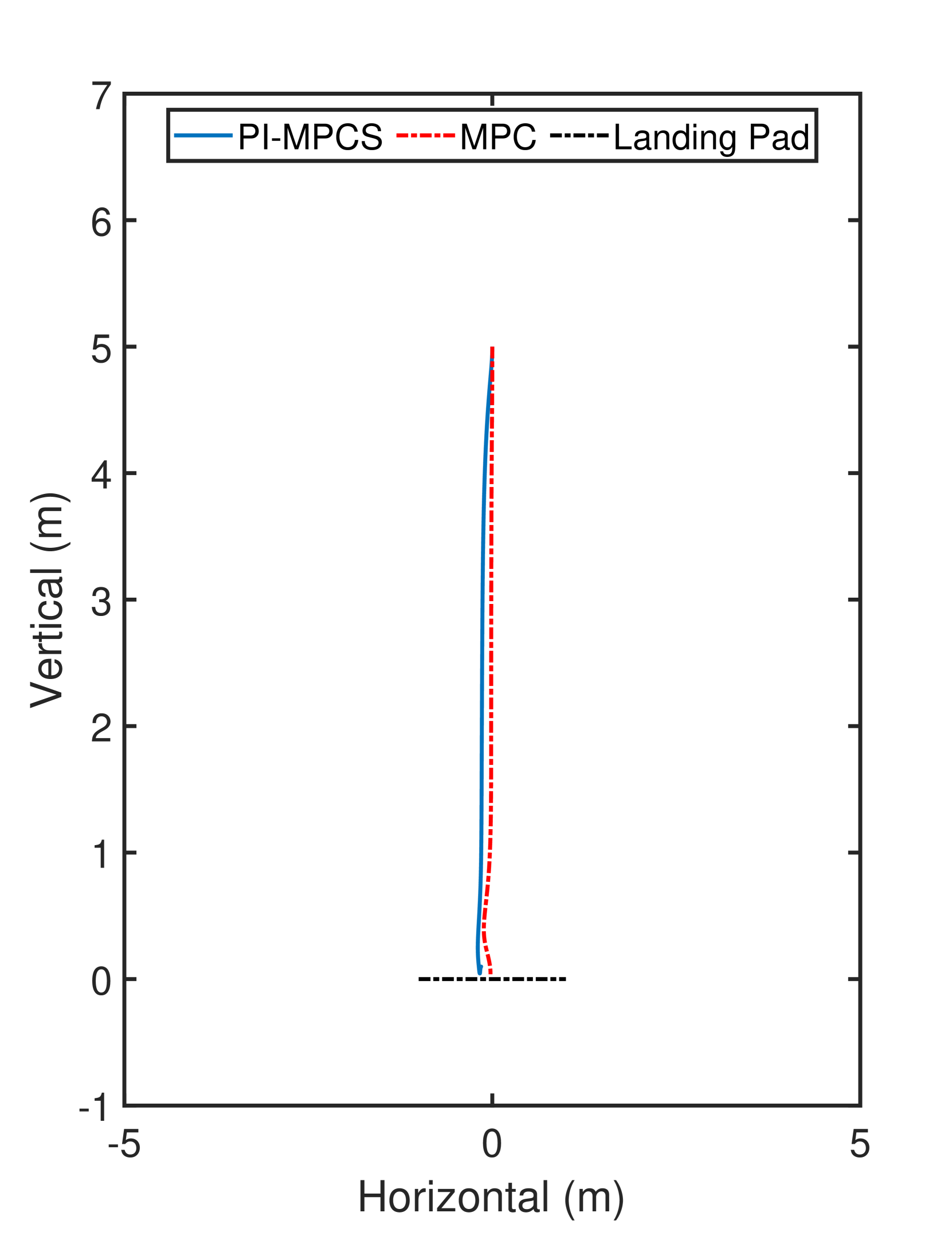
本文提出了一种小型确定性的基于物理信息的模型预测控制代理模型(PI-MPCS),旨在解决模型预测控制(MPC)在计算资源有限的小型系统中应用受限的问题。PI-MPCS通过集成系统动力学和构建李雅普诺夫稳定性剖面来近似MPC的控制,从而保证稳定性和鲁棒性。在2D四旋翼飞行器着陆任务上的实验结果表明,PI-MPCS能够在非线性系统上实现快速而精确的MPC近似,并且与MPC相比,计算需求估计可加速两倍。此外,PI-MPCS在离散动力学残差和李雅普诺夫稳定性损失函数的鼓励下,对分布内和分布外的状态都表现出一定程度的稳定控制。PI-MPCS旨在作为MPC的替代方案,适用于计算资源受限的情况。
🔬 方法详解
问题定义:模型预测控制(MPC)虽然控制效果好,但需要针对每个新状态重新计算最优控制,导致响应速度慢,并且在计算资源有限的小型系统中难以部署。现有的MPC方法计算复杂度高,难以满足实时性要求,尤其是在需要快速响应的控制任务中。
核心思路:本文的核心思路是训练一个轻量级的代理模型(PI-MPCS)来近似MPC的控制策略。该代理模型通过融入系统动力学知识和李雅普诺夫稳定性约束,保证了控制的稳定性和鲁棒性,同时降低了计算复杂度。这样,在实际应用中,可以直接使用PI-MPCS进行快速控制,而无需每次都运行复杂的MPC算法。
技术框架:PI-MPCS的整体框架包括以下几个关键部分:1) 系统动力学建模:利用已知的系统物理信息建立动力学模型。2) MPC数据生成:使用MPC算法生成训练数据,包括状态和对应的最优控制量。3) 代理模型训练:使用生成的数据训练PI-MPCS,使其能够近似MPC的控制策略。4) 稳定性约束:在训练过程中,通过引入离散动力学残差和李雅普诺夫稳定性损失函数,鼓励PI-MPCS学习稳定的控制策略。
关键创新:本文最重要的技术创新在于将物理信息和李雅普诺夫稳定性分析融入到MPC代理模型的训练中。传统的MPC代理模型通常只关注拟合MPC的控制输出,而忽略了控制的稳定性和鲁棒性。PI-MPCS通过引入物理信息和稳定性约束,能够学习到更加安全可靠的控制策略,并且在面对未知的状态时也能保持一定的稳定性。
关键设计:PI-MPCS的关键设计包括:1) 离散动力学残差损失函数:用于约束代理模型的输出与系统动力学模型的一致性。2) 李雅普诺夫稳定性损失函数:用于鼓励代理模型学习稳定的控制策略,保证系统的稳定性。3) 代理模型的网络结构:选择合适的网络结构,例如小型神经网络,以保证计算效率。4) 训练数据的选择:选择具有代表性的状态作为训练数据,以提高代理模型的泛化能力。
🖼️ 关键图片
📊 实验亮点
实验结果表明,PI-MPCS能够在2D四旋翼飞行器着陆任务中实现快速而精确的MPC近似,并且与MPC相比,计算需求估计可加速两倍。此外,PI-MPCS在分布内和分布外的状态都表现出一定程度的稳定控制,验证了其稳定性和鲁棒性。
🎯 应用场景
该研究成果可应用于计算资源受限的机器人控制领域,例如小型无人机、微型机器人等。通过使用PI-MPCS,可以在这些平台上实现快速、稳定的控制,从而提高机器人的性能和可靠性。此外,该方法还可以推广到其他需要实时控制的领域,例如自动驾驶、工业自动化等,具有广泛的应用前景。
📄 摘要(原文)
At the forefront of control techniques is Model Predictive Control (MPC). While MPCs are effective, their requisite to recompute an optimal control given a new state leads to sparse response to the system and may make their implementation infeasible in small systems with low computational resources. To address these limitations in stability control, this research presents a small deterministic Physics-Informed MPC Surrogate model (PI-MPCS). PI-MPCS was developed to approximate the control by an MPC while encouraging stability and robustness through the integration of the system dynamics and the formation of a Lyapunov stability profile. Empirical results are presented on the task of 2D quadcopter landing. They demonstrate a rapid and precise MPC approximation on a non-linear system along with an estimated two times speed up on the computational requirements when compared against an MPC. PI-MPCS, in addition, displays a level of stable control for in- and out-of-distribution states as encouraged by the discrete dynamics residual and Lyapunov stability loss functions. PI-MPCS is meant to serve as a surrogate to MPC on situations in which the computational resources are limited.