Lossless optimal transient control for rigid bodies in 3D space
作者: Riccardo Zanella, Federico Califano, Antonio Franchi, Stefano Stramigioli
分类: eess.SY
发布日期: 2024-10-21 (更新: 2025-11-18)
💡 一句话要点
提出一种无损最优瞬态控制方案,用于三维空间刚体控制
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 刚体控制 瞬态控制 无损控制 非线性控制 模型预测控制 陀螺效应 姿态控制
📋 核心要点
- 现有刚体控制方法在瞬态行为优化方面存在不足,难以同时保证稳定性和性能。
- 该方案参数化最优控制输入,设计无损非线性反馈控制器,产生虚构陀螺效应力矩。
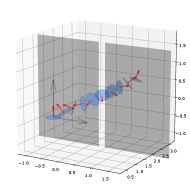
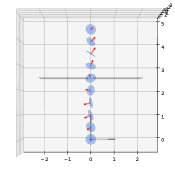
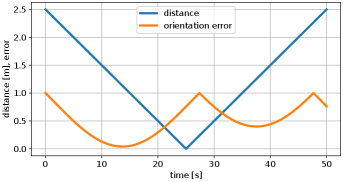
- 通过MPC仿真验证,该控制器在稳定任务中成功结合了稳定性和性能,并实现了避障。
📝 摘要(中文)
本文提出了一种针对刚体的控制方案,旨在优化瞬态行为。通过参数化最优控制输入的搜索空间,得到一个被动的、特别是无损的非线性反馈控制器。因此,它可以与其他稳定控制器结合使用,而不会影响闭环系统的稳定性。该控制器通过产生虚构的陀螺效应力矩来控制刚体,这种力矩是三维旋转刚体运动的特征,因此不会向系统注入或提取动能。我们在仿真中使用模型预测控制(MPC)方案验证了该控制器,成功地将稳定性和性能结合在具有避障约束的稳定任务中。
🔬 方法详解
问题定义:论文旨在解决三维空间中刚体运动的瞬态控制问题,即如何在保证系统稳定性的前提下,快速、平稳地达到期望状态。现有方法可能在瞬态性能方面存在不足,或者难以处理复杂的约束条件(如避障)。
核心思路:论文的核心思路是设计一个无损的非线性反馈控制器。该控制器通过产生虚构的陀螺效应力矩来控制刚体,这种力矩不会改变系统的总能量,从而保证了系统的稳定性。同时,通过优化控制输入的参数,可以改善系统的瞬态性能。
技术框架:该控制方案主要包含以下几个部分:1) 参数化最优控制输入:将控制输入表示为一组参数的函数,从而将控制问题转化为参数优化问题。2) 设计无损非线性反馈控制器:基于参数化的控制输入,设计一个被动的、无损的非线性反馈控制器。3) 模型预测控制(MPC):将该控制器与MPC相结合,以处理复杂的约束条件(如避障)并进一步优化系统的性能。
关键创新:该论文的关键创新在于提出了一个无损的非线性反馈控制器,该控制器通过产生虚构的陀螺效应力矩来控制刚体,从而保证了系统的稳定性。与传统的基于能量注入或提取的控制方法不同,该方法不会改变系统的总能量,因此更加稳定可靠。
关键设计:控制器的关键设计在于参数化控制输入,并确保控制器是无损的。具体而言,控制输入被设计成与刚体的角速度相关的形式,并且满足一定的约束条件,以保证控制器不会向系统注入或提取能量。此外,MPC的设计也需要考虑系统的动力学特性和约束条件,以实现最佳的控制效果。
🖼️ 关键图片
📊 实验亮点
论文通过仿真实验验证了所提出的控制方案的有效性。实验结果表明,该控制器能够成功地将稳定性和性能结合在具有避障约束的稳定任务中。具体的性能数据和对比基线未知,但仿真结果表明该方法具有良好的控制效果。
🎯 应用场景
该研究成果可应用于无人机、机器人、卫星等需要精确姿态控制的领域。例如,在无人机飞行过程中,该控制器可以帮助无人机快速、平稳地调整姿态,从而提高飞行性能和安全性。此外,该方法还可以应用于机器人操作、卫星姿态控制等领域,具有广泛的应用前景。
📄 摘要(原文)
In this letter, we propose a control scheme for rigid bodies designed to optimise transient behaviors. The search space for the optimal control input is parameterized to yield a passive, specifically lossless, nonlinear feedback controller. As a result, it can be combined with other stabilizing controllers without compromising the stability of the closed-loop system. The controller commands torques generating fictitious gyroscopic effects characteristics of 3D rotational rigid body motions, and as such does not inject nor extract kinetic energy from the system. We validate the controller in simulation using a model predictive control (MPC) scheme, successfully combining stability and performance in a stabilization task with obstacle avoidance constraints.