Robust Tracking Control with Neural Network Dynamic Models under Input Perturbations
作者: Huixuan Cheng, Hanjiang Hu, Changliu Liu
分类: eess.SY
发布日期: 2024-10-14 (更新: 2025-06-15)
备注: 7 pages, 8 figures, conference
💡 一句话要点
针对输入扰动下神经网络动态模型的鲁棒跟踪控制方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 鲁棒控制 神经网络动态模型 可达性分析 跟踪控制 输入扰动
📋 核心要点
- 现有鲁棒控制方法在控制仿射系统上表现出色,但难以直接应用于基于神经网络的动态模型,这是一个挑战。
- 论文提出了一种基于可达性分析的鲁棒跟踪控制方法,通过可达集来处理不确定性,并设计反馈策略保证系统稳定性。
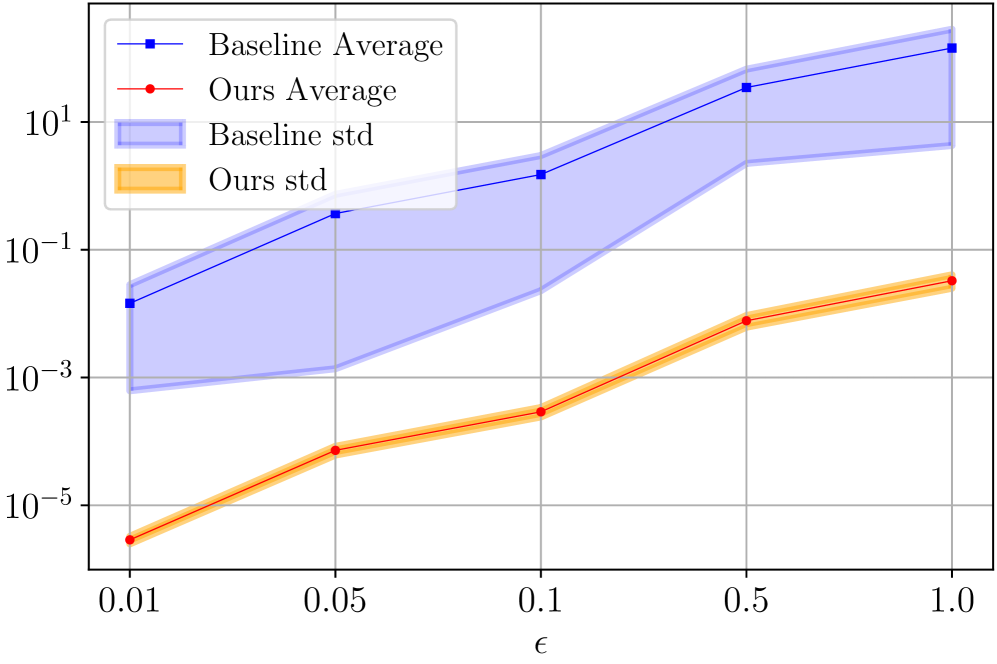
- 通过数值模拟验证了该方法的有效性,并与标准管状模型预测控制(MPC)方法进行了比较,展示了其优越性。
📝 摘要(中文)
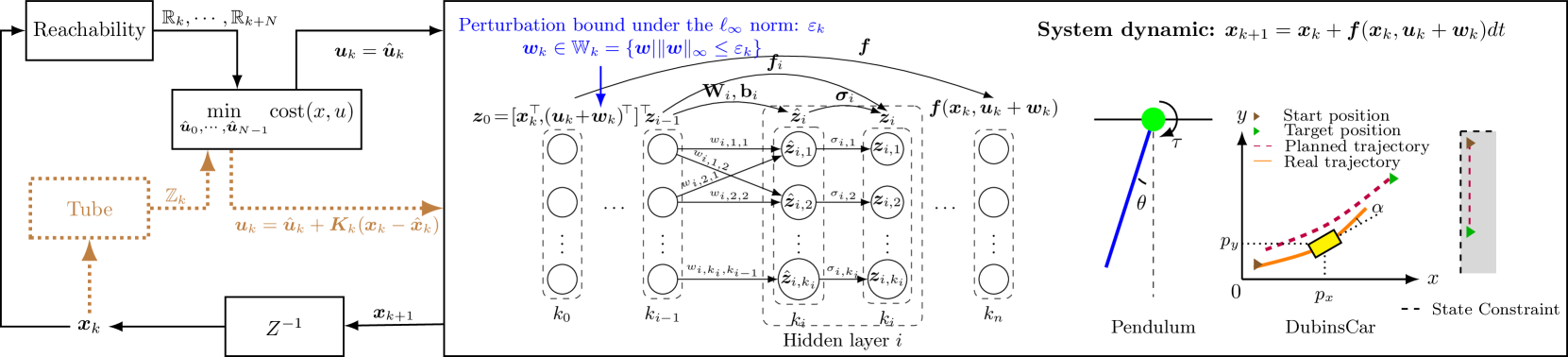
本文研究了外部扰动对控制方法性能产生显著影响下的鲁棒控制问题。现有鲁棒控制方法擅长于控制仿射系统,但难以应用于神经网络动态模型。为这类系统开发鲁棒控制方法仍然是一个复杂的挑战。本文侧重于神经网络动态模型的鲁棒跟踪方法。首先,提出了一种针对该系统的可达性分析工具,然后介绍了如何用可达集重新构建鲁棒跟踪问题。此外,证明了存在一种反馈策略,可以限制可达集在无限范围内的增长。通过跟踪任务的数值模拟验证了所提出方法的有效性,并将其与标准管状MPC方法进行了比较。
🔬 方法详解
问题定义:论文旨在解决输入扰动下,基于神经网络动态模型的系统的鲁棒跟踪控制问题。现有方法,特别是针对控制仿射系统的鲁棒控制方法,无法直接应用于神经网络动态模型,因为神经网络的非线性和复杂性使得传统方法难以进行精确的误差界定和控制设计。因此,如何在存在扰动的情况下,保证神经网络动态模型的跟踪性能和稳定性是一个关键问题。
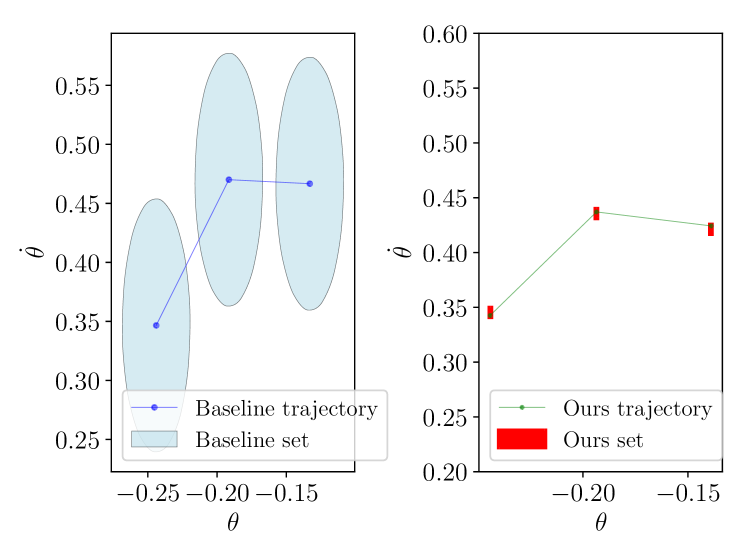
核心思路:论文的核心思路是利用可达性分析来量化系统状态的不确定性,并基于可达集设计鲁棒控制器。通过将鲁棒跟踪问题转化为可达集约束下的优化问题,可以保证系统在存在扰动的情况下,状态始终保持在安全区域内,从而实现鲁棒跟踪。此外,论文还证明了存在一种反馈策略,可以限制可达集在无限范围内的增长,保证系统的稳定性。
技术框架:论文的技术框架主要包括以下几个模块:1) 神经网络动态模型:使用神经网络来表示系统的动态特性。2) 可达性分析工具:用于计算系统在给定扰动下的可达集。3) 鲁棒跟踪问题重构:将鲁棒跟踪问题转化为基于可达集的约束优化问题。4) 反馈策略设计:设计一种反馈策略,以限制可达集的增长,保证系统的稳定性。5) 数值模拟验证:通过数值模拟验证所提出方法的有效性。
关键创新:论文的关键创新在于将可达性分析与神经网络动态模型相结合,提出了一种新的鲁棒跟踪控制方法。与现有方法相比,该方法能够更好地处理神经网络的非线性特性,并能够有效地量化和控制系统状态的不确定性。此外,论文还证明了存在一种反馈策略,可以保证系统的稳定性,这为鲁棒控制器的设计提供了理论基础。
关键设计:论文的关键设计包括:1) 可达性分析工具的设计:需要选择合适的可达性分析算法,并针对神经网络动态模型的特点进行优化。2) 鲁棒跟踪问题的重构:需要选择合适的可达集表示方法,并将鲁棒跟踪问题转化为可解的优化问题。3) 反馈策略的设计:需要设计一种能够限制可达集增长的反馈策略,并保证系统的稳定性。具体的参数设置、损失函数、网络结构等技术细节在论文中可能没有详细描述,属于未知信息。
🖼️ 关键图片
📊 实验亮点
论文通过数值模拟验证了所提出方法的有效性,并将其与标准管状MPC方法进行了比较。具体性能数据未知,但结果表明,该方法在跟踪任务中表现出更好的鲁棒性和稳定性。与传统方法相比,该方法能够更好地应对输入扰动,并保证系统状态始终保持在安全区域内。具体的提升幅度未知。
🎯 应用场景
该研究成果可应用于机器人、自动驾驶、航空航天等领域,特别是在需要高精度和高可靠性的控制系统中。例如,在自动驾驶中,车辆需要在复杂的环境中进行精确的轨迹跟踪,同时还要应对各种外部扰动,如路面不平、风力等。该方法可以提高自动驾驶系统的鲁棒性和安全性。此外,该方法还可以应用于工业机器人,提高其在复杂环境下的作业能力。
📄 摘要(原文)
Robust control problems have significant practical implications since external disturbances can significantly impact the performance of control methods. Existing robust control methods excel at control-affine systems but fail at neural network dynamic models. Developing robust control methods for such systems remains a complex challenge. In this paper, we focus on robust tracking methods for neural network dynamic models. We first propose a reachability analysis tool designed for this system and then introduce how to reformulate a robust tracking problem with reachable sets. In addition, we prove the existence of a feedback policy that bounds the growth of reachable sets over an infinite horizon. The effectiveness of the proposed approach is validated through numerical simulations of the tracking task, where we compare it with a standard tube MPC method.