Reachability Analysis for Black-Box Dynamical Systems
作者: Vamsi Krishna Chilakamarri, Zeyuan Feng, Somil Bansal
分类: eess.SY
发布日期: 2024-10-10
💡 一句话要点
提出一种黑盒动态系统的可达性分析方法,扩展了HJ可达性分析的应用范围。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 可达性分析 黑盒系统 Hamilton-Jacobi 机器人 自主系统
📋 核心要点
- 现有HJ可达性分析方法依赖白盒模型,限制了其在实际机器人等黑盒系统中的应用。
- 该论文提出一种新的可达性分析方法,通过采样近似Hamiltonian函数,求解HJ PDE,从而获得黑盒系统的可达集。
- 在黑盒滑轮汽车和四足机器人上的仿真实验表明,该方法能够准确获得黑盒动态系统的可达集。
📝 摘要(中文)
Hamilton-Jacobi (HJ) 可达性分析是确保自主系统安全性和性能的强大框架。然而,现有方法通常依赖于系统的白盒动力学模型,限制了其在许多实际机器人场景中的应用,因为这些场景中只有系统的黑盒模型可用。本文提出了一种新的可达性方法,用于计算黑盒动态系统的可达集和安全控制器。我们的方法利用来自黑盒动力学的样本高效地近似 Hamiltonian 函数。然后,使用该 Hamiltonian 函数求解 HJ 偏微分方程 (PDE),从而提供系统的可达集。所提出的方法可以应用于一般的非线性系统,并且可以与现有的白盒系统可达性工具箱无缝集成,以将其用途扩展到黑盒系统。通过对黑盒滑轮汽车和四足机器人的仿真研究,我们证明了我们的方法在准确获得黑盒动态系统的可达集方面的有效性。
🔬 方法详解
问题定义:论文旨在解决黑盒动态系统的可达性分析问题。现有Hamilton-Jacobi (HJ) 可达性分析方法主要依赖于系统的白盒模型,即需要知道系统的精确动力学方程。然而,在许多实际机器人应用中,我们只能获得系统的黑盒模型,例如通过强化学习训练得到的策略或者复杂的物理引擎模拟器。因此,如何对黑盒动态系统进行可达性分析,保证系统的安全性和性能,是一个重要的挑战。
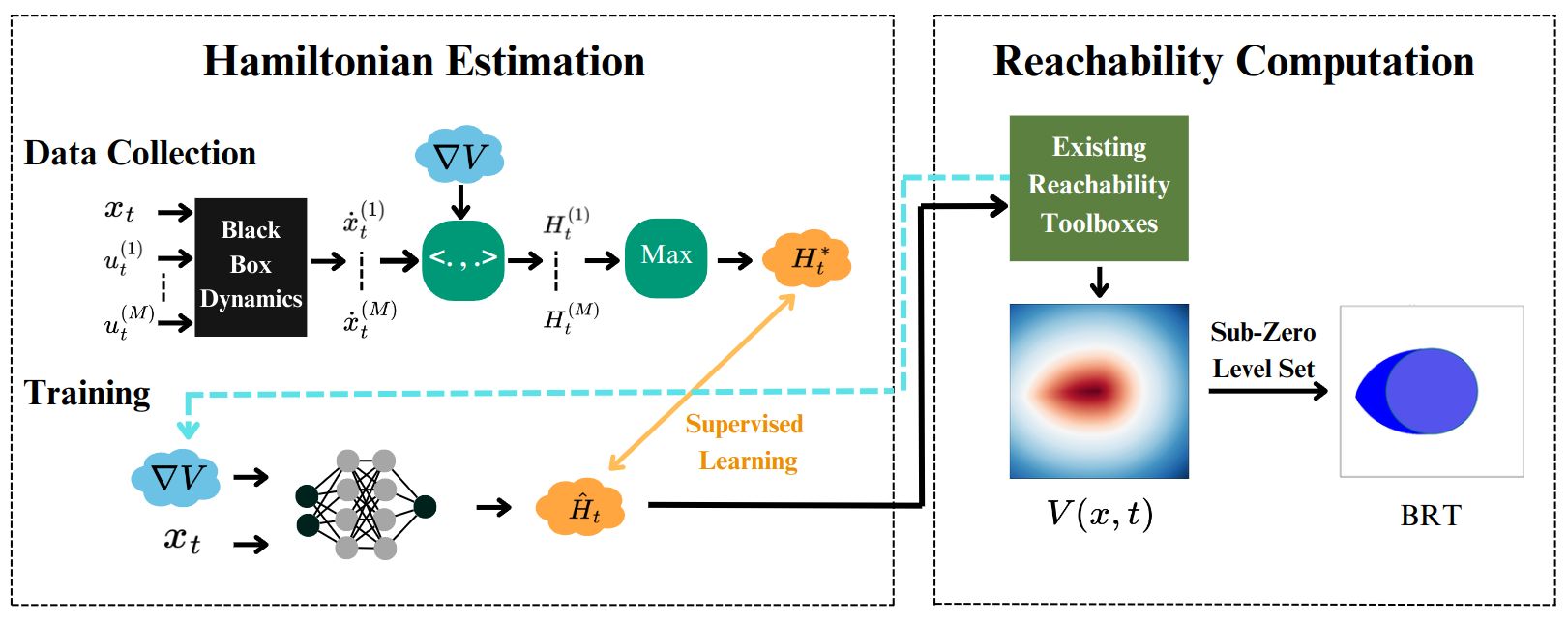
核心思路:论文的核心思路是利用黑盒动力学模型的采样数据来近似Hamiltonian函数,从而绕过对精确动力学模型的依赖。具体来说,通过在状态空间中采样,并利用黑盒模型计算状态的导数,可以估计Hamiltonian函数的值。然后,利用这些估计值来构建Hamiltonian函数的近似模型。
技术框架:该方法主要包含以下几个阶段:1. 数据采样:在状态空间中进行采样,获得状态样本。2. Hamiltonian函数近似:利用黑盒动力学模型计算状态样本的导数,并使用这些数据来近似Hamiltonian函数。可以使用各种函数近似方法,例如神经网络或高斯过程。3. HJ PDE求解:使用近似的Hamiltonian函数求解HJ偏微分方程,得到值函数。4. 可达集计算:根据值函数计算可达集。
关键创新:该方法最重要的创新点在于它能够对黑盒动态系统进行可达性分析,而无需知道系统的精确动力学模型。这使得HJ可达性分析方法可以应用于更广泛的实际机器人场景。与现有方法相比,该方法不需要对系统进行建模,而是直接利用黑盒模型进行分析。
关键设计:Hamiltonian函数的近似方法是一个关键的设计选择。论文中可能使用了某种特定的函数近似方法,例如神经网络或高斯过程。此外,HJ PDE的求解方法也是一个重要的考虑因素。论文中可能使用了某种数值方法,例如有限差分法或水平集方法。具体的参数设置和网络结构等技术细节未知。
🖼️ 关键图片

📊 实验亮点
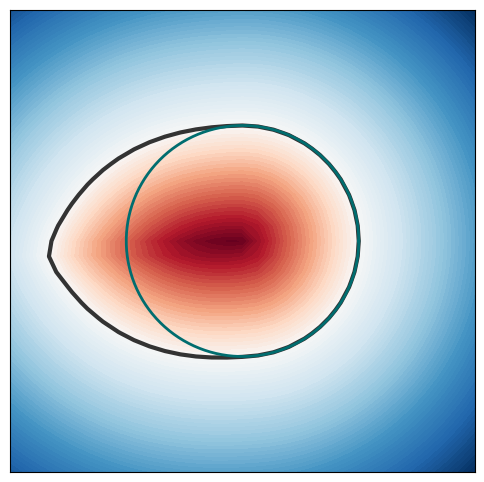
论文通过在黑盒滑轮汽车和四足机器人上的仿真实验验证了该方法的有效性。实验结果表明,该方法能够准确地获得黑盒动态系统的可达集,从而为安全控制和规划提供了保障。具体的性能数据和提升幅度未知,需要在论文中进一步查找。
🎯 应用场景
该研究成果可广泛应用于机器人、自动驾驶等领域,尤其是在系统动力学模型难以获取或不精确的情况下。例如,可以用于验证强化学习训练得到的控制策略的安全性,或者用于规划复杂地形下的机器人运动轨迹。该方法能够提高自主系统的安全性和可靠性,具有重要的实际应用价值。
📄 摘要(原文)
Hamilton-Jacobi (HJ) reachability analysis is a powerful framework for ensuring safety and performance in autonomous systems. However, existing methods typically rely on a white-box dynamics model of the system, limiting their applicability in many practical robotics scenarios where only a black-box model of the system is available. In this work, we propose a novel reachability method to compute reachable sets and safe controllers for black-box dynamical systems. Our approach efficiently approximates the Hamiltonian function using samples from the black-box dynamics. This Hamiltonian is then used to solve the HJ Partial Differential Equation (PDE), providing the reachable set of the system. The proposed method can be applied to general nonlinear systems and can be seamlessly integrated with existing reachability toolboxes for white-box systems to extend their use to black-box systems. Through simulation studies on a black-box slip-wheel car and a quadruped robot, we demonstrate the effectiveness of our approach in accurately obtaining the reachable sets for blackbox dynamical systems.