Probabilistically Robust Trajectory Planning of Multiple Aerial Agents
作者: Christian Vitale, Savvas Papaioannou, Panayiotis Kolios, Georgios Ellinas
分类: eess.SY
发布日期: 2024-09-19
备注: 18th International Conference on Control, Automation, Robotics and Vision (ICARCV 2024)
期刊: IEEE 18th International Conference on Control, Automation, Robotics and Vision (ICARCV), pp. 1-8, Dubai, United Arab Emirates, December 2024
DOI: 10.1109/ICARCV63323.2024.10821544
💡 一句话要点
提出一种概率鲁棒的分布式控制器,用于多无人机在非高斯不确定性和非线性系统下的安全轨迹规划。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 鲁棒轨迹规划 多无人机协同 非高斯不确定性 模型预测控制 分布式控制
📋 核心要点
- 现有鲁棒轨迹规划方法依赖线性系统模型和高斯扰动假设,难以应对复杂非线性系统和非高斯不确定性。
- 论文提出一种概率鲁棒分布式控制器,利用混合三角多项式矩传播技术处理非高斯不确定性,并将其转化为确定性约束。
- 仿真结果验证了该方法在复杂场景下处理多种不确定性的有效性,实现了鲁棒且精确的路径规划。
📝 摘要(中文)
当前关于自主代理鲁棒轨迹规划的研究旨在减轻由扰动和建模误差引起的不确定性,同时确保安全。现有方法主要采用具有概率约束的随机最优控制技术,以保证代理之间以一定的概率维持最小距离。然而,这些方法面临挑战,例如使用简化假设导致线性系统模型或高斯扰动,这限制了它们在复杂现实场景中的实用性。为了解决这些局限性,本研究提出了一种新的概率鲁棒分布式控制器,使自主代理即使在非高斯不确定性和非线性系统下也能规划安全轨迹。该方法利用基于混合三角多项式矩传播的精确不确定性传播技术,将非高斯概率约束转换为确定性约束,并将其无缝集成到可以使用标准优化工具求解的分布式模型预测控制框架中。仿真结果表明了该技术的有效性,突出了其一致处理各种类型不确定性的能力,从而确保了在复杂场景中鲁棒而精确的路径规划。
🔬 方法详解
问题定义:论文旨在解决多无人机在存在非高斯不确定性和非线性系统动力学的情况下,如何进行鲁棒的轨迹规划,以保证无人机之间的安全距离并避免碰撞。现有方法通常假设系统是线性的,扰动是高斯的,这在实际应用中往往不成立,导致规划的轨迹安全性无法保证。因此,需要一种能够处理非高斯不确定性和非线性系统的鲁棒轨迹规划方法。
核心思路:论文的核心思路是利用精确的不确定性传播技术,将非高斯概率约束转化为确定性约束,从而能够将其集成到标准的优化框架中进行求解。具体来说,论文采用基于混合三角多项式矩传播的方法来精确地传播不确定性,避免了传统方法中常用的线性化和高斯近似,从而提高了鲁棒性。
技术框架:整体框架是一个分布式模型预测控制(DMPC)框架。每个无人机都有一个局部控制器,负责根据自身的状态和环境信息规划轨迹。这些局部控制器通过通信进行协调,以避免碰撞并实现全局目标。框架包含以下主要模块:1) 状态估计模块,用于估计无人机的当前状态;2) 不确定性传播模块,用于计算状态不确定性的演化;3) 约束转换模块,用于将概率约束转化为确定性约束;4) 优化求解模块,用于求解DMPC问题,得到最优轨迹。
关键创新:论文最重要的技术创新点在于使用了基于混合三角多项式矩传播的精确不确定性传播技术。与传统的线性化和高斯近似方法相比,该方法能够更准确地描述非高斯不确定性的演化,从而提高了鲁棒性。此外,将非高斯概率约束转化为确定性约束,使得可以使用标准的优化工具来求解DMPC问题,降低了计算复杂度。
关键设计:论文的关键设计包括:1) 使用混合三角多项式来表示状态的不确定性;2) 利用矩传播技术来计算不确定性的演化;3) 将概率约束转化为确定性约束,例如使用切比雪夫不等式或更精确的近似方法;4) 设计合适的DMPC目标函数,以实现轨迹的平滑性和安全性。具体的参数设置取决于具体的应用场景和无人机的动力学模型。
🖼️ 关键图片


📊 实验亮点
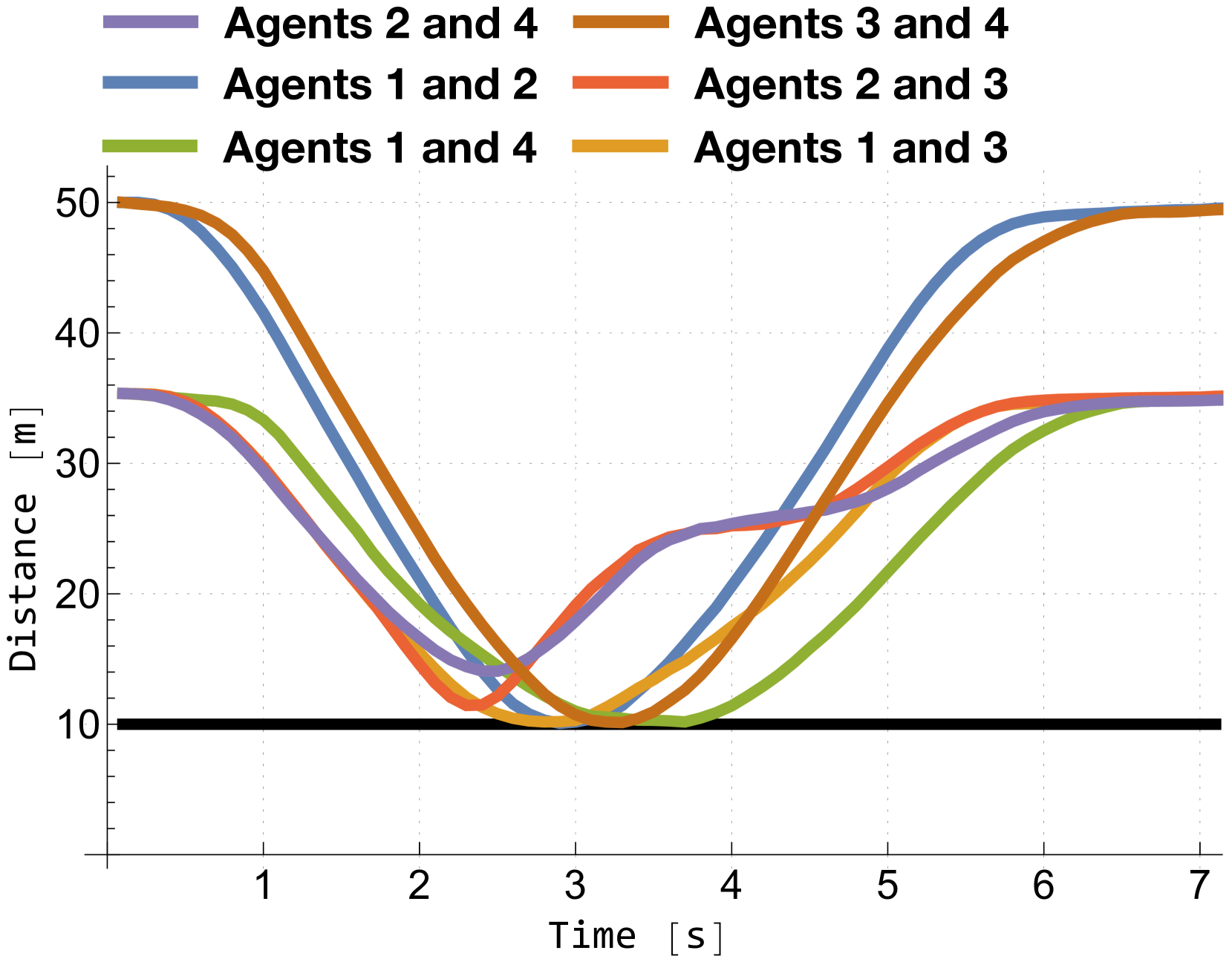
仿真结果表明,该方法能够有效地处理各种类型的非高斯不确定性,并保证无人机之间的安全距离。与传统的基于线性化和高斯近似的方法相比,该方法能够显著提高轨迹的鲁棒性,并降低碰撞的概率。具体的性能数据(例如碰撞概率、轨迹偏差等)在论文中进行了详细的分析和比较。
🎯 应用场景
该研究成果可应用于各种多智能体协同任务,例如无人机集群表演、自主物流配送、灾难救援等。通过确保无人机在复杂环境中的安全飞行,可以提高任务的效率和可靠性。此外,该方法还可以推广到其他类型的自主代理,例如自动驾驶车辆和机器人。
📄 摘要(原文)
Current research on robust trajectory planning for autonomous agents aims to mitigate uncertainties arising from disturbances and modeling errors while ensuring guaranteed safety. Existing methods primarily utilize stochastic optimal control techniques with chance constraints to maintain a minimum distance among agents with a guaranteed probability. However, these approaches face challenges, such as the use of simplifying assumptions that result in linear system models or Gaussian disturbances, which limit their practicality in complex realistic scenarios. To address these limitations, this work introduces a novel probabilistically robust distributed controller enabling autonomous agents to plan safe trajectories, even under non-Gaussian uncertainty and nonlinear systems. Leveraging exact uncertainty propagation techniques based on mixed-trigonometric-polynomial moment propagation, this method transforms non-Gaussian chance constraints into deterministic ones, seamlessly integrating them into a distributed model predictive control framework solvable with standard optimization tools. Simulation results demonstrate the effectiveness of this technique, highlighting its ability to consistently handle various types of uncertainty, ensuring robust and accurate path planning in complex scenarios.