Real-Time Linear MPC for Quadrotors on SE(3): An Analytical Koopman-based Realization
作者: Santosh M. Rajkumar, Chengyu Yang, Yuliang Gu, Sheng Cheng, Naira Hovakimyan, Debdipta Goswami
分类: eess.SY
发布日期: 2024-09-19 (更新: 2025-10-17)
备注: 6 pages, 3 figures, accepted for publication at IEEE Robotics and Automation Letters
💡 一句话要点
提出基于Koopman理论的四旋翼飞行器实时线性MPC控制方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四旋翼飞行器控制 模型预测控制 Koopman理论 线性参数变分 实时控制
📋 核心要点
- 传统非线性MPC计算量大,线性MPC精度不足,难以兼顾四旋翼飞行器的实时性和控制精度。
- 利用Koopman理论,将非线性系统转化为线性参数变分(LPV)表示,在提升空间中进行控制。
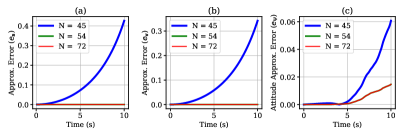
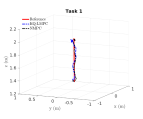
- 实验验证表明,该方法在保证实时性的前提下,实现了与非线性MPC相当的轨迹跟踪性能。
📝 摘要(中文)
本文提出了一种基于Koopman理论的四旋翼飞行器动力学线性参数变分(LPV)表示方法,旨在实现计算高效的线性模型预测控制(LMPC),用于实时轨迹跟踪。通过精心设计的Koopman可观测量,该方法能够实现紧凑的提升空间演化,从而减轻维度灾难,同时保留系统的非线性特征。尽管模型预测控制(MPC)是四旋翼飞行器控制的强大策略,但它面临着非线性MPC(NMPC)的高计算成本和LMPC的降低精度之间的权衡。为了解决这一差距,我们引入了KQ-LMPC(Koopman Quasilinear LPV MPC),它利用Koopman提升的LPV公式来强制约束,确保较低的计算负担和实时可行性,并提供与NMPC相当的跟踪性能。实验验证证实了该框架在相当灵活的飞行中的有效性。据我们所知,这是第一个经过实验验证的四旋翼飞行器LMPC,它采用分析导出的Koopman可观测量,而无需训练数据。
🔬 方法详解
问题定义:四旋翼飞行器的精确控制面临着非线性动力学带来的挑战。传统的非线性模型预测控制(NMPC)虽然精度高,但计算复杂度过高,难以满足实时性要求。而线性模型预测控制(LMPC)虽然计算速度快,但由于忽略了非线性特性,控制精度会受到影响。因此,如何在保证实时性的前提下,实现对四旋翼飞行器的精确控制是一个关键问题。
核心思路:本文的核心思路是利用Koopman理论将非线性系统转化为线性系统,从而可以使用计算效率更高的线性模型预测控制。Koopman理论通过将状态空间映射到高维的“提升空间”,使得非线性动力学在提升空间中呈现线性特性。通过精心设计的Koopman可观测量,可以在保证精度的前提下,降低计算复杂度。
技术框架:该方法主要包含以下几个步骤:1) 利用Koopman理论对四旋翼飞行器的动力学进行建模,得到线性参数变分(LPV)表示。2) 基于该LPV模型,设计线性模型预测控制器(LMPC)。3) 在线优化LMPC,计算控制输入。4) 将控制输入作用于四旋翼飞行器。整个框架的关键在于Koopman可观测量的选择和LMPC的设计。
关键创新:该方法最重要的创新点在于提出了一个解析的Koopman可观测量,无需通过数据驱动的方式进行学习。传统的Koopman方法通常需要大量的训练数据来学习Koopman算子或可观测量,而本文提出的方法可以直接通过解析的方式推导出Koopman可观测量,从而避免了数据依赖性,提高了模型的泛化能力。
关键设计:Koopman可观测量的选择是至关重要的,需要仔细设计以保证提升空间的线性特性,同时避免维度灾难。LMPC的设计需要考虑控制约束和目标函数,以保证控制器的稳定性和性能。此外,还需要对LPV模型进行参数化,以便在线调整模型参数,适应不同的飞行条件。
🖼️ 关键图片

📊 实验亮点
实验结果表明,所提出的KQ-LMPC方法在保证实时性的前提下,实现了与非线性MPC相当的轨迹跟踪性能。具体而言,该方法能够在合理灵活的飞行中有效工作,并且是第一个经过实验验证的四旋翼飞行器LMPC,它采用分析导出的Koopman可观测量,而无需训练数据。这显著降低了对数据的依赖,并提高了算法的实用性。
🎯 应用场景
该研究成果可应用于无人机自主导航、智能巡检、物流配送等领域。通过提高四旋翼飞行器的控制精度和实时性,可以使其在复杂环境中执行更加精确的任务,例如在狭窄空间内飞行、进行高精度目标跟踪等。此外,该方法还可以推广到其他非线性系统的控制中,具有广泛的应用前景。
📄 摘要(原文)
This letter presents an analytical linear parameter-varying (LPV) representation of quadrotor dynamics utilizing Koopman theory, facilitating computationally efficient linear model predictive control (LMPC) for real-time trajectory tracking. By leveraging carefully designed Koopman observables, the proposed approach enables a compact lifted-space evolution that mitigates the curse of dimensionality while preserving the nonlinear characteristics of the system. Although model predictive control (MPC) is a powerful strategy for quadrotor control, it faces a trade-off between the high computational cost of nonlinear MPC (NMPC) and the reduced accuracy of LMPC. To address this gap, we introduce KQ-LMPC (Koopman Quasilinear LPV MPC), which leverages the Koopman-lifted LPV formulation to enforce constraints, ensure lower computational burden and real-time feasibility, and deliver tracking performance comparable to NMPC. Experimental validation confirms the effectiveness of the framework in reasonably agile flight. To the best of our knowledge, this is the first experimentally validated LMPC for quadrotors that employs analytically derived Koopman observables without requiring training data.